
STUDIA PODYPLOMOWE
Edycja 2 – 2023/2024 REKRUTACJA ZAMKNIĘTA
AUTOMATYZACJA, ROBOTYZACJA I CYFRYZACJA PROCESÓW PRODUKCYJNYCH (ARICPP)
PROGRAM TERMINARZ LABORATORIA KADRA OPŁATY I BONUSY PARTNERZY DYPLOMY I CERTYFIKATY KONTAKT i REKRUTACJA
Głównym organizatorem Studiów Podyplomowych ARiCPP jest Politechnika Śląska, mająca swoją siedzibę w Gliwicach. Politechnika Śląska to wysoko notowana w kraju uczelnia badawcza, kształcąca inżynierów, magistrów inżynierów i doktorów, na potrzeby różnych gałęzi przemysłu i nauki.
Jednostką odpowiedzialną za prowadzenie Studiów Podyplomowych ARiCPP jest Wydział Mechaniczny Technologiczny. Jest to jeden z największych Wydziałów Politechniki Śląskiej. Absolwenci Wydziału znajdują pracę w takich gałęziach przemysłu, jak przemysł: maszynowy, lekki, spożywczy, metalowy, środków transportu i wiele innych.
Głównym partnerem w realizacji Studiów Podyplomowych ARiCPP, odpowiedzialnym za prowadzenie wielu przedmiotów, udostępniającym unikatowe, specjalistyczne laboratoria jest EMT-Systems Centrum Szkoleń Inżynierskich.
EMT-Systems jest największym i najbardziej kompleksowym centrum szkoleń inżynierskich w Polsce, specjalizującym się w organizacji kursów i szkoleń z zakresu mechatroniki, robotyki, sterowania i wizualizacji procesów, a także szeroko pojmowanych technik inżynierskich.
ZAPISZ SIĘ!
ATUTY
- Studia Podyplomowe ARiCPP to jedyne w Polsce studia umożliwiające praktyczną realizację ćwiczeń laboratoryjnych z wykorzystaniem indywidualnych stanowisk szkoleniowych, zbudowanych z robotów przemysłowych, demonstratorów technologii, aktualnych, a także licencjonowanych wersji oprogramowania inżynierskiego.
- Zajęcia są prowadzone przez pracowników naukowo-dydaktycznych Politechniki Śląskiej oraz inżynierów projektantów i integratorów systemów automatyki, doświadczonych inżynierów praktyków utrzymania ruchu maszyn i urządzeń.
- Absolwenci Studiów Podyplomowych ARiCPP nabędą kompleksową wiedzę z zakresu najnowocześniejszych trendów w automatyce przemysłowej, zdobędą wiedzę z zakresu wykorzystania i posługiwania się specjalistycznym oprogramowaniem, będą przygotowani do prowadzenia nadzoru nad złożonymi systemami produkcyjnymi, działającymi zgodnie ze standardami Przemysłu 4.0.
- Wiedza, umiejętności i kompetencje zdobyte podczas Studiów Podyplomowych ARiCPP mogą się okazać bardzo przydatne w przypadku podjęcia przez Kandydata decyzji o realizacji doktoratu wdrożeniowego.
- Kandydatem na studia podyplomowe może być osoba, która posiada kwalifikację pełną co najmniej na poziomie szóstym PRK, uzyskaną w systemie szkolnictwa wyższego i nauki (studia pierwszego stopnia, studia drugiego stopnia, jednolite studia magisterskie).
STUDIA DOFINANSOWANE!
Istnieje możliwość dofinansowania opłaty za Studia Podyplomowe ARICCP. Poniżej cztery programy pozwalające uzyskać dofinansowanie pod warunkiem spełnienia wymagań:
- Krajowy Fundusz Szkoleniowy

- Projekt OPEN – pożyczek w ramach projektu pt. Fundusz „Ogólnopolski Program Edukacji Naukowej”
- Projekt „Pożyczki na kształcenie”

- Fundusz Pracy

W przypadku pytań i wątpliwości o wybór ścieżki dofinansowania prosimy o kontakt:
- AGNIESZKA FRANC - Specjalista ds. Projektów Dofinansowanych w EMT-Systems
- agnieszka.franc@emt-systems.pl
- tel. 501 322 109
Grupy docelowe studiów podyplomowych ARiCPP

PROGRAM
Prezentujemy wykaz przedmiotów prowadzonych podczas Studiów Podyplomowych „Automatyzacja, robotyzacja i cyfryzacja procesów produkcyjnych„.
Zapraszamy do rozwinięcia zakładki i zapoznania się ze szczegółami, dotyczącymi każdego przedmiotu.
SEMESTR 1 – Edycja 2
Zakres przedmiotu:
- Podstawowe pojęcia i określenia automatyki przemysłowej.
- Podział układów automatycznej regulacji. Układy otwarte i zamknięte.
- Sprzężenie zwrotne.
- Opis analityczny członów i układów automatycznej regulacji.
- Metody modelowania. Różniczkowe równania ruchu.
- Klasyfikacja wymuszeń.
- Przekształcenie Laplace’a.
- Podstawowe człony układów automatycznej regulacji: bezinercyjne, rzędu pierwszego, rzędu drugiego, całkujące, różniczkujące, opóźniające.
- Charakterystyki członów układów ar: statyczne, dynamiczne, czasowe, częstotliwościowe, amplitudowe i fazowe.
- Transmitancja operatorowa członu układu automatycznej regulacji.
- Schematy blokowe układów ar. Algebra schematów blokowych. Grafy przepływu sygnałów układów automatycznej regulacji. Algebra grafów przepływu sygnałów.
- Transmitancje operatorowe układów jednowymiarowych i wielowymiarowych.
- Podstawy analizy widmowej.
- Transmitancja widmowa układu.
- Klasyfikacja i opis obiektów sterowania.
- Regulatory. Struktura i podział regulatorów. Klasyfikacja regulatorów ciągłego działania: proporcjonalne, całkujące, proporcjonalno – całkujące, proporcjonalno – różniczkujące, proporcjonalno – całkująco – różniczkujące.
- Transmitancja operatorowa regulatora PID.
- Odpowiedź regulatora PID na zadany, standardowy, sygnał uchybu regulacji.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie teoretyczne podstawy automatyki, jako dziedziny nauki, zajmującej się zagadnieniami sterowania różnorodnymi procesami, głównie technologicznymi i przemysłowymi.
- Potrafi identyfikować oraz formułować werbalnie i matematycznie różnorodne problemy inżynierskie, związane z automatyką i robotyką przemysłową, poprzez zastosowanie zasad nauki i wiedzy inżynieryjno-technicznej.
- Potrafi modelować matematycznie systemy dynamiczne, w tym układy sterowania, a także dokonywać ich syntezy, analizy i optymalizacji w dziedzinie częstotliwości i w dziedzinie czasu.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Jest gotów samodzielnie poszerzać wiedzę z obszaru automatyki, niezbędną do świadomego projektowania i użytkowania układów zautomatyzowanych oraz rozumie potrzebę nieustannego prowadzenia takich studiów.
Prowadzący: Prof. Dr hab. inż. Jerzy Świder
Zakres przedmiotu:
- Idea sterowania procesów i maszyn w oparciu o sterownik PLC
- Pierwszy projekt w TIA Portal
- Podstawowa diagnostyka sterownika PLC
- Zasady tworzenia programów w języku drabinkowym LAD
- Operacje logiczne w sterowniku PLC
- Rodzaje obszarów pamięci sterownika
- Monitorowanie i testowanie programów
- Przekazywanie wartości pomiędzy parametrami
- Monitorowanie i modyfikowanie zmiennych
- Tworzenie backupów
- Archiwizacja projektu
- Formatowanie pamięci CPU
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- est gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Marcin Podsiadły
Zakres przedmiotu:
- Możliwości projektowania systemów sterowania z wykorzystaniem sterowników Mitsubishi MELSEC-Q
- Struktura środowiska GX Works 2
- Konfiguracja połączenia ze sterownikiem Q
- Parametryzacja CPU
- Adresacja modułów wejściowych i wyjściowych
- Podstawowe rozkazy budujące logikę programu sterującego
- Cykl pracy sterownika Q
- Możliwości wprowadzania komentarzy
- Narzędzia wspierające monitorowanie pracy sterownika
- Etykiety globalne i lokalne
- Praca ze zmiennymi binarnymi
- Diagnostyka błędów sterownika Q
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Marcin Podsiadły
Zakres przedmiotu:
- Podstawowe układy wykonawcze
- Zastosowanie logiki Boole'a w układach automatyki przemysłowej
- Podział na czujniki i urządzenia wykonawcze
- Automatyzacja procesów dyskretnych vs. procesów ciągłych
- Języki programowania układów sterujących
- Wprowadzenie do normy IEC 61131-3
- Zasady poprawnego kodowania w językach: IL, LD, FBD, SFC i ST
- Wprowadzenie do środowiska programowania CoDeSys v2.3
- Tworzenie i analiza programów sterujących oraz wizualizacji
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: dr inż. Piotr Michalski
Zakres przedmiotu:
- Bezpieczeństwo pracy przy i z robotem - procedury bezpiecznej pracy podczas programowania i pracy automatycznej.
- Panel operatora (KCP). Budowa i funkcje. Opcje dostępne w menu na poziomie operatora.
- Poruszanie manipulatorem przy pomocy przycisków kierunku i (układy współrzędnych, ruchy osiami manipulatora w trybie pracy ręcznej, wykonywanie programu).
- Wyznaczanie układów współrzędnych (narzędzia i bazy).
- Programowanie ścieżki pracy robota – ruchy PTP, LIN i CIRC.
- Ręczne i programowe sterowanie sygnałami cyfrowymi (OUT, PULSE).
- Parametryzacja instrukcji ruchu.
- Wykonywanie programu w trybie pracy ręcznej i automatycznej AUTO.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Tomasz Nowak
Zakres przedmiotu:
- Systemy bezpieczeństwa stosowane w robotyce przemysłowej
- Etapy uruchomienia produkcji zrobotyzowanej
- Bezpieczeństwo pracy z robotem - ogólne zasady
- Bezpieczna praca w trybie ręcznym
- Obsługa i kontrolki na elementach szafy robota
- Obsługa joysticka
- Przemieszczanie robota osiami
- Przemieszczanie robota liniowo i reorientacja
- Opis programowania robotów przemysłowych
- Struktura programu w języku RAPID
- Tworzenie własnych procedur
- Typy punktów ruchu
- Instrukcje ruchu osiami
- Instrukcje ruchu liniowego
- Parametryzowanie instrukcji ruchu
- Korygowanie pozycji
- Modyfikacja programów
- Testowanie wprowadzonych zmian
- Układ wejść i wyjść robota
- Podgląd wyjść wejść
- Backup Robota
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Wojciech Szulc
Zakres przedmiotu:
- Wstęp do przemysłowych sieci komunikacyjnych,
- Przegląd standardowych protokołów komunikacyjnych wykorzystywanych w przemyśle na przykładzie sieci:
- ProfiBus
- ProfiNET
- EtherCAT
- Modbus RTU i TCP
- ASi
- Zestawienie i porównanie standardów Profibus, ProfiNET, EtherCAT, Modbus, ASi
- Konfiguracja, wymiana danych oraz podstawy diagnostyki w sieciach:
- ProfiBus
- ProfiNET
- EtherCAT
- Modbus RTU i TCP
- ASi
- Możliwości rozwojowe przemysłowych sieci komunikacyjnych w ramach czwartej rewolucji przemysłowej Industry 4.0
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie ogólne działanie informacyjnych sieci przemysłowych PROFINET i PROFIBUS.
- Potrafi dokonać samodzielnej konfiguracji sieci PROFINET i PROFIBUS w zakresie podstawowym.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: Dr inż. Piotr Świszcz
Zakres przedmiotu:
- Systemy SCADA – wprowadzenie
- Konfiguracja SCADA
- Stworzenie nowego projektu dla sterownika i wizualizacji
- Konfiguracja sterownika S7-1500, z którego będą pobierane informacje do wizualizacji
- Konfiguracja połączenia wizualizacji ze sterownikiem PLC
- Konfiguracja zmiennych w wizualizacji WinCC
- Tworzenie ekranów wizualizacji, przełączanie między ekranami
- Obiekty graficzne na bazie których jest tworzona wizualizacja - dynamiczne zmiany wyglądu obiektów od wartości zmiennych procesowych
- Gotowe symbole graficzne, pola edycyjne, listy tekstowe i graficzne
- Podstawowe zdarzenia obiektów wizualizacji - reakcja na kliknięcie myszką w obiekt graficzny, podstawowe funkcje biblioteczne podłączane do zdarzeń
- Obsługa alarmów procesowych
- Obsługa archiwizacji zmiennych, przedstawienie wartości archiwalnych na wykresach czasowych
- Konfiguracja użytkowników systemu wizualizacji - zabezpieczenie przed dostępem dla osób nieuprawnionych
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC
- Zna i rozumie systemy archiwizacji i raportowania w oprogramowaniu typu SCADA.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi tworzyć proste wizualizacje, weryfikujące poziomy dostępu do wybranych operacji.
- Potrafi utworzyć proste ekrany w oparciu o listy, obiekty Faceplate, skrypty VB, pętle.
- Potrafi skonfigurować podstawowy układ sterownika PLC i panelu operatorskiego HMI.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Jest gotów samodzielnie poszerzać wiedzę z obszaru automatyki, niezbędną do świadomego projektowania i użytkowania układów zautomatyzowanych oraz rozumie potrzebę nieustannego prowadzenia takich studiów.
Prowadzący: mgr inż. Andrzej Kasprzycki
Zakres przedmiotu:
- Wprowadzenie do Siemens TIAPortal.
- Tworzenie nowego projektu.
- Konfiguracja sterownika PLC S7-1200.
- Przygotowanie projektu TIA Portal dla panelu Basic.
- Wykorzystanie kreatora dla panelu HMI.
- Podstawowe elementy wizualizacji.
- Konfiguracja, edycja i tworzenie plansz.
- Animacje obiektów – Display (Appearance, Visibility) oraz Movement.
- Wykresy.
- Obsługa programu ProSave.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC
- Zna i rozumie systemy archiwizacji i raportowania w oprogramowaniu typu SCADA.
- Potrafi skonfigurować podstawowy układ sterowników PLC i paneli operatorskich HMI.
Prowadzący: mgr inż. Marcin Podsiadły
Zakres przedmiotu:
- Definicja pneumatyki, sterowania i napędu pneumatycznego.
- Podstawy fizyczne pneumatyki.
- Wady i zalety stosowania układów pneumatycznych w porównaniu do układów hydraulicznych czy elektrycznych.
- Symbolika i nazewnictwo elementów pneumatycznych.
- Budowa i podział sprężarek.
- Zasada działania i elementy składowe układu przygotowania powietrza.
- Zasady projektowania układów pneumatycznych.
- Budowa i działanie elementów sterujących: sterowanie kierunkiem przepływu; sterowanie ciśnieniem; sterowanie natężeniem przepływu medium roboczego.
- Pneumatyczne elementy wykonawcze w ruchu liniowym i obrotowym: tłokowe; membranowe; workowe i inne.
- Praktyczne zastosowanie elektropneumatyki w procesach technologicznych.
- Sterowanie pośrednie i bezpośrednie.
- Zasady BHP w pneumatyce.
- Zapis działania układu za pomocą cyklogramu działania i grafu.
- Analiza i synteza wybranych procesów technologicznych sterowanych pneumatycznie. Komputerowe programy wspomagające proces projektowania i symulacji układów.
- Sterowanie układów elektropneumatycznych z zastosowaniem sterownika programowalnych PLC.
- Podczas zajęć laboratoryjnych zostaną zrealizowane następujące tematy:
- automatyzacja wybranych procesów technologicznych,
- przeprowadzenie analizy działania zaprojektowanego układu,
- wykonanie dokumentacji utworzonego układu (cyklogram działania, graf, schemat układu),
- przeprowadzeni syntezy według założonego cyklogramu działania,
- komputerowa symulacja w programie FluidSIM,
- tworzenie złożonych funkcji sterujących z zastosowaniem logiki Boole’a
- minimalizacja funkcji Boolowskich, tworzenie tabeli stanów.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie teoretyczne podstawy automatyki, jako dziedziny nauki, zajmującej się zagadnieniami sterowania różnorodnymi procesami, głównie technologicznymi i przemysłowymi.
- Potrafi identyfikować elementy pneumatyczne i elektropneumatyczne stosowane w przemyśle.
- Potrafi zaprojektować dowolny układ pneumatyczny/ elektropneumatyczny.
Prowadzący: Dr hab. inż. Andrzej Wróbel
Zakres przedmiotu:
- Omówienie aktualnej struktury Politechniki Śląskiej, Wydziału Mechanicznego Technologicznego i Firmy EMT-Systems Centrum Szkoleń Inżynierskich. .
- Omówienie zasad zdobywania i posługiwania się tytułami zawodowymi, stopniami naukowymi, tytułem naukowym.
- Omówienie stanowisk i pełnionych na uczelniach wyższych funkcji.
- Przedstawienie zasad, dotyczących struktury pracy końcowej na studiach podyplomowych oraz jej edycji.
- Ochrona własności intelektualnej.
- Przygotowanie Uczestnika do prezentacji przed komisją wyników swojej pracy końcowej.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia związane ze strukturą Politechniki Śląskiej, Wydziału Mechanicznego Technologicznego i Firmy EMT-Systems Centrum Szkoleń Inżynierskich.
- Zna i rozumie zasad zdobywania i posługiwania się tytułami zawodowymi, stopniami naukowymi, tytułem naukowym.
- Zna zasady, dotyczące struktury pracy końcowej na studiach podyplomowych oraz zasady jej edycji.
- Rozumie konieczność ochrony własności intelektualnej innych autorów podczas tworzenia własnej pracy końcowej.
- Jest przygotowany do prezentacji przed komisją wyników swojej pracy końcowej.
Prowadzący: Prof. dr hab. inż. Jerzy Świder
SEMESTR 2 – Edycja 2
Zakres przedmiotu:
- Sterowalność i obserwowalność.
- Charakterystyki Nyquista i charakterystyki Bodego.
- Stabilność układów dynamicznych.
- Kryteria stabilności układów sterowania: Hurwitza, Michajłowa, Nyquista.
- Analiza stabilności otwartych i zamkniętych układów sterowania.
- Zmienne stanu. Fazowe zmienne stanu. Równia stanu.
- Modelowanie układów dynamicznych w przestrzeni stanów.
- Związek pomiędzy transmitancją operatorową a równaniami stanu.
- Transformacja transmitancji operatorowej do postaci równań stanu.
- Transformacja równań stanu do postaci transmitancji operatorowej.
- Analiza układu sterowania w dziedzinie czasu z zastosowaniem równań stanu.
- Jakość układów sterowania. Kryteria oceny jakości liniowych układów regulacji. Wskaźniki jakości.
- Statyczna dokładność liniowych układów regulacji.
- Uchyb w stanie ustalonym.
- Dynamiczna jakość liniowych układów regulacji. Ocena jakości regulacji poprzez: badanie parametrów odpowiedzi skokowej, kryteria całkowe, kryteria częstotliwościowe, metody miejsc geometrycznych biegunów transmitancji operatorowej.
- Zapas stabilności i jego ocena. Zapas modułu i zapas fazy.
- Opis układu regulacji z regulatorem PID oraz dobór jego parametrów, zgodnie z przyjętymi kryteriami jakości regulacji.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie teoretyczne podstawy automatyki, jako dziedziny nauki, zajmującej się zagadnieniami sterowania różnorodnymi procesami, głównie technologicznymi i przemysłowymi.
- Potrafi identyfikować oraz formułować werbalnie i matematycznie różnorodne problemy inżynierskie, związane z automatyką i robotyką przemysłową, poprzez zastosowanie zasad nauki i wiedzy inżynieryjno-technicznej.
- Potrafi modelować matematycznie systemy dynamiczne, w tym układy sterowania, a także dokonywać ich syntezy, analizy i optymalizacji w dziedzinie częstotliwości i w dziedzinie czasu.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Jest gotów samodzielnie poszerzać wiedzę z obszaru automatyki, niezbędną do świadomego projektowania i użytkowania układów zautomatyzowanych oraz rozumie potrzebę nieustannego prowadzenia takich studiów.
Prowadzący: Prof. dr hab. inż. Jerzy Świder
Zakres przedmiotu:
- Zasady bezpieczeństwa na stanowiskach zrobotyzowanych
- Podstawowe zasady bezpiecznej pracy z robotem przemysłowym
- Budowa robota przemysłowego (wiadomości podstawowe)
- iPendant – podstawowe funkcje
- Możliwości zastosowań robotów przemysłowych
- Sterowanie robotem w trybie manualnym
- Poruszanie robotem w trybie: joint, word, tool
- Programowanie on-line
- Tworzenie nowego i edycja istniejącego programu, zarządzanie programami
- Instrukcja ruchu i edycja jej parametrów
- Uruchamianie programu w trybie ręcznym
- Bezpieczne zatrzymanie, modyfikacja i ponowne uruchomienie programu robota
- Instrukcje programowe
- Pętle, etykiety
- Instrukcje warunkowe IF
- Obsługa wejść/wyjść
- Rejestry numeryczne
- Uruchomienie programu w trybie automatycznym
- Ręczna manipulacja punktem
- Backup programów i plików systemowych
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Karol Franc
Zakres przedmiotu:
- Bezpieczeństwo pracy przy i z robotem - procedury bezpiecznej pracy podczas programowania i pracy automatycznej.
- Panel operatora (KCP). Budowa i funkcje. Opcje dostępne w menu na poziomie operatora.
- Zasady bezpieczeństwa na stanowiskach zrobotyzowanych:
- Podstawowe zasady bezpiecznej pracy z robotem przemysłowym.
- Budowa robota przemysłowego (wiadomości podstawowe):
- Teach Pendant – podstawowe funkcje.
- Sterowanie robotem w trybie manualnym:
- Poruszanie robotem w trybie: joint, word, tool.
- Wejścia/Wyjścia – symulacja wejść i wystawianie wyjść.
- Programowanie on-line:
- Tworzenie nowego i edycja istniejącego programu.
- Typy ruchów robota, parametryzacja instrukcji ruchu.
- Uruchamianie programu w trybie ręcznym.
- Bezpieczne zatrzymanie, modyfikacja i ponowne uruchomienie programu robota.
- Uruchomienie programu w trybie automatycznym.
- Układy współrzędnych - tworzenie i modyfikacja:
- Narzędzia (Tool Frames).
- Użytkownika (User Frames).
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Tomasz Nowak
Zakres przedmiotu:
- Definicje i cechy napędów:
- Klasyczne napędy elektryczne.
- Serwonapęd, napęd mechatroniczny.
- Budowa i działanie silników elektrycznych:
- Silnik prądu stałego.
- Silnik prądu przemiennego.
- Moc elektryczna.
- Układy zasilania w przemysłowych napędach elektrycznych.
- Bezpośredni.
- Gwiazda-trójkąt.
- Softstart.
- Przemiennik częstotliwości (podstawowa konfiguracja w praktyce).
- Sterowanie w napędach elektrycznych z przemiennikiem częstotliwości:
- Automatyczna regulacja parametrów ruchu (tryb skalarny, tryb wektorowy).
- Czujniki w regulacji prędkości i pozycji.
- Hamowanie.
- Podstawowe zagadnienia z diagnostyki przemysłowych napędów elektrycznych
- Wielkości diagnostyczne.
- Monitorowanie i archiwizacja parametrów eksploatacyjnych za pomocą wykresów.
- Identyfikacja nieprawidłowości w układach z przemiennikiem częstotliwości.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń.
- Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
Prowadzący: dr inż. Julian Malaka
Zakres przedmiotu:
- Maszyna w ujęciu systemowym.
- Narzędzia rozpoznawania stanów przebiegu procesu przemysłowego lub pracy maszyn.
- Podział metod diagnostyki.
- Zalecenia dotyczące pozyskiwania sygnałów diagnostycznych z maszyn. TPM - Total Productive Maintenance.
- Cele wprowadzenia TPM.
- Straty powodowane awariami oraz powody przestojów.
- TPM a TQM – różnice i podobieństwa.
- Metody eksploatacji.
- Wdrożenie TPM. Wskaźniki TPM. Etapy wdrażania TPM.
- Autonomiczne Utrzymanie Ruchu (ang. Autonomous Maintenance).
- Istotne elementy w monitorowaniu maszyn.
- Metoda ADMA w zastosowaniach związanych z TPM.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami w kontekście optymalizacji ich pracy oraz zarządzeniem cyklem życia.
- Zna i rozumie pojęcie Przemysłu 4.0 (Przemysłu Przyszłości), wirtualnego bliźniaka oraz wirtualnego uruchomienia.
- Zna i rozumie mechanizmy prawidłowego wdrożenia i stosowania metodologii TPM.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów animować działania w obszarze Przemysłu 4.0, wykorzystując różne modele biznesowe.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Potrafi pozyskiwać informacje z literatury i innych źródeł na temat nowych technologii, oceniać je, selekcjonować i wykorzystywać.
Prowadzący: Dr hab. inż. Mariusz Hetmańczyk
Zakres przedmiotu:
- Sieci przemysłowe, proces i komponenty ICS
- Omówienie komponentów sieci przemysłowej
- Wstęp do modelu PERA
- Wprowadzenie do sieci przemysłowych opartych o Ethernet
- Sieciowy model ISO/OSI i protokoły natywne dla każdej warstwy
- Komunikacja w sieci Ethernet – podstawy
- Komunikacja w warstwach wyższych L3 i L4
- Przegląd protokołów przemysłowych
- Ataki na systemy przemysłowe
- Podatności w protokołach i komponentach ICS
- ICS Kill Chain – fazy ataku i przykłady udanych ataków
- Możliwości działań defensywnych
- Architektura
- Ochrona pasywna
- Ochrona aktywna
- Działania wywiadowcze
- Działania ofensywne
- Aktywny cykl działań cyberbezpieczeństwa
- Przegląd norm i dobrych praktyk
- Standard IEC 62443
- Ustawa o KSC, materiały RCB
- Ćwiczenia 1 - Inwentaryzacja zasobów systemów ICS
- Ćwiczenia 2 – Monitorowanie bezpieczeństwa sieci
- Ćwiczenia 3 – Bezpieczna architektura ICS
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie zasady bezpieczeństwa cybernetycznego sieci przemysłowych.
- Potrafi uruchomić monitorowanie infrastruktury sieciowej w systemie IDS.
- Potrafi wykorzystać wiedzę dotyczącą: Przemysłu 4.0, zarządzania ryzykiem, decyzji biznesowych.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Stefan Bednarczyk
Zakres przedmiotu:
- Podstawowe pojęcia i koncepcje cyberbezpieczeństwa:
- Poufność, integralność, dostępność, niezaprzeczalność, rozliczalność.
- Zagrożenia, ataki, zasoby.
- Ryzyko, podatności.
- Najniższe uprawnienia i rozdział obowiązków, ochrona wielowarstwowa.
- Rodzaje cyberzagrożeń i ataków:
- Złośliwe oprogramowanie.
- Ataki socjotechniczne.
- Zagrożenia pochodzące z wewnątrz organizacji.
- Przyczyny występowania zagrożeń.
- Fazy cyberataku:
- Kill-chain.
- Model Mitre ATT&CK.
- Przegląd udanych ataków.
- Techniki i zasady zabezpieczania systemów informatycznych zgodnie z defence-in-depth:
- Bezpieczeństwo fizyczne.
- Uwierzytelnianie, autoryzacja, kontrola dostępu.
- Ciągłe monitorowanie sieci, systemy wykrywanie włamań.
- Zapory sieciowe i systemy zapobiegania włamaniom.
- Segmentacja sieci.
- Systemy antywirusowe.
- Hardening systemów.
- Rozwiązania kryptograficzne.
- Normy i dobre praktyki.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie zasady bezpieczeństwa cybernetycznego sieci przemysłowych.
- Potrafi uruchomić monitorowanie infrastruktury sieciowej w systemie IDS.
- Potrafi wykorzystać wiedzę dotyczącą: Przemysłu 4.0, zarządzania ryzykiem, decyzji biznesowych.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Stefan Bednarczyk
Zakres przedmiotu:
- Wprowadzenie do napędów i sterowań hydrostatycznych
- Podstawy działania napędów hydraulicznych i hydrotronicznych
- Parametry pracy napędów hydrostatycznych
- Budowa typowego napędu hydraulicznego
- Funkcje elementów składowych napędów i sterowań hydraulicznych
- Wprowadzenie do techniki sterowania proporcjonalnego
- Symulacja działania wybranych układów napędowych w środowisku symulacyjnym
- Budowa układów na stanowiskach szkoleniowych
- Poruszanie robotem w trybie: joint, word, tool
- Analiza działania układów z liniowymi i obrotowymi odbiornikami
- Analiza działania układów sterowanych dławieniowo i objętościowo – porównanie strat mocy
- Analiza działania układów z zaworami proporcjonalnymi przepływu i ciśnienia
- Porównanie wyników analiz symulacyjnych z wynikami pomiarów układów rzeczywistych
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie budowę i zasady działania najważniejszych elementów hydrauliki siłowej i hydrotroniki.
- Zna i rozumie symbole graficzne, czyta oraz interpretuje schematy układów hydraulicznych.
- Potrafi samodzielnie budować, montować, uruchamiać i testować poprawność działania prostych układów hydraulicznych i hydrotronicznych.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: dr inż. Dominik Rabsztyn
Zakres przedmiotu:
- Przygotowanie przez Uczestnika studiów podyplomowych pracy końcowej.
- Wystąpienia Uczestników z prezentacjami prac końcowych (10 min. wystąpienia każdego Uczestnika i 10 min. wspólnej dyskusji)
- Przygotowanie przez Uczestnika studiów podyplomowych artykułu z obszaru implementacji automatyki przemysłowej.
- Prezentacje przez Uczestników propozycji artykułów oraz dyskusja nad przedstawionymi propozycjami publikacji (10 min. wystąpienia każdego Uczestnika i 10 min. wspólnej dyskusji).
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Jest autorem pracy końcowej, zaprezentowanej na zajęciach i obronionej w trakcie wspólnej dyskusji.
- Jest autorem lub współautorem propozycji artykułu z obszaru implementacji automatyki przemysłowej, zaprezentowanego na zajęciach i przeanalizowanego w trakcie wspólnej dyskusji.
Prowadzący: Prof. dr hab. inż. Jerzy Świder

TERMINARZ
Miejsca realizacji zajęć:
- EMT-Systems – siedziba firmy EMT-Systems Sp. z o.o ul. Bojkowska 35A, Gliwice, budynek CECHOWNIA Gliwice
- Wydział MT, sala 279 – Wydział Mechaniczny Technologiczny Politechniki Śląskiej, ul Konarskiego 18A, Gliwice sala 279 II.piętro
- CNT Politechniki Śl. – Naukowo-Dydaktyczne Centrum Nowych Technologii Politechniki Śląskiej, ul Konarskiego 22B, Gliwice
| Termin / Miejsce | Godziny | Przedmiot |
|---|---|---|
| Semestr 1 | ||
| 14 października 2023 r. (sobota) Wydział MT | 9:00 – 10:30 | Uroczyste otwarcie studiów ARiCPP |
| 14 października 2023 r. (sobota) EMT-Systems | 11:00 – 17:00 | Elementy i układy sterowania pneumatycznego; cz.1 (dr hab. inż. Andrzej Wróbel, prof. PŚ) |
| 15 października 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Automatyzacja sterowania procesami – PLC Siemens / TIAPortal (mgr inż. Marcin Podsiadły) |
| 28 października 2023 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Podstawy automatyki przemysłowej; wykład cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 28 października 2023 r. (sobota) EMT-Systems | 13:30 – 17:00 | Automatyzacja sterowania procesami – PLC (dr inż. Piotr Michalski) |
| 29 października 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa A: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów ABB (mgr inż. Karol Franc) Grupa B: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów KUKA (mgr inż. Tomasz Nowak) |
| 18 listopada 2023 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Podstawy automatyki przemysłowej; wykład cz.2 (prof. dr hab. inż. Jerzy Świder) |
| 18 listopada 2023 r. (sobota) EMT-Systems | 13:30 – 17:00 | Elementy i układy sterowania pneumatycznego; cz.2 (dr hab. inż. Andrzej Wróbel, prof. PŚ) |
| 19 listopada 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Automatyzacja sterowania procesami – PLC Siemens / TIAPortal (mgr inż. Marcin Podsiadły) |
| 2 grudnia 2023 r. (sobota) EMT-Systems | 9:00 – 17:00 | Zastosowania paneli operatorskich HMI (mgr inż. Marcin Podsiadły) |
| 3 grudnia 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Przemysłowe sieci komunikacyjne – PROFINET, Ethernet (mgr inż. Marcin Podsiadły) |
| 16 grudnia 2023 r. (sobota) EMT-Systems | 9:00 – 17:00 | Wizualizacja procesów przemysłowych – systemy SCADA (mgr inż. Andrzej Kasprzycki) |
| 17 grudnia 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa B: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów ABB (mgr inż. Wojciech Szulc) Grupa A: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów KUKA (mgr inż. Tomasz Nowak) |
| 13 stycznia 2024 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Egzamin z „Podstaw automatyki przemysłowej”; Omówienie wyników egzaminu; Seminarium z zakresu przygotowywania pracy końcowej; cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 27 stycznia 2024 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Egzamin z „Podstaw automatyki przemysłowej”; Seminarium z zakresu przygotowywania pracy końcowej; cz.2 (prof. dr hab. inż. Jerzy Świder) |
| Termin / Miejsce | Godziny | Przedmiot |
|---|---|---|
| Semestr 2 | ||
| 9 marca 2024 r. (sobota) EMT-Systems | 9:00 – 17:00 | Grupa A: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów FANUC (mgr inż. Karol Franc) Grupa B: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów YASKAWA (mgr inż. Tomasz Nowak) |
| 10 marca 2024 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Metodologia TPM w automatyce przemysłowej (Dr hab. inż. Mariusz Hetmańczyk, prof. PŚ) |
| 23 marca 2024 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Teoria sterowania; wykład cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 23 marca 2024 r. (sobota) Wydział MT, sala 279 | 13:30 – 17:00 | Wsparcie i finansowanie procesów cyfryzacji i automatyzacji (CP4.0PŚ – dr Andrzej Soldaty) |
| 24 marca 2024 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa B: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów FANUC (mgr inż. Karol Franc) Grupa A: Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów YASKAWA (mgr inż. Tomasz Nowak) |
| 6 kwietnia 2024 r. (sobota) CNT Politechniki Śl. | 9:00 – 17:00 | Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0 (Dr inż. Sebastian Temich; mgr inż. Jacek Kucharczyk) |
| 7 kwietnia 2024 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa A: Napędy i sterowania w hydraulice siłowej (dr inż. Dominik Rabsztyn) Grupa B: Wybrane, elektryczne systemy napędowe w przemyśle – (dr inż. Julian Malaka) |
| 20 kwietnia 2024 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Teoria sterowania; wykład cz.2 (prof. dr hab. inż. Jerzy Świder) |
| 20 kwietnia 2024 r. (sobota) EMT-Systems | 13:30 – 17:00 | Cyberbezpieczeństwo systemów informatycznych (mgr inż. Stefan Bednarczyk) |
| 21 kwietnia 2024 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa B: Napędy i sterowania w hydraulice siłowej (dr inż. Dominik Rabsztyn) Grupa A: Wybrane, elektryczne systemy napędowe w przemyśle – (dr inż. Julian Malaka) |
| 11 maja 2024 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Egzamin z „Teorii sterowania”; Omówienie wyników egzaminu; Seminarium i projekt z zakresu pracy końcowej cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 12 maja 2024 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Cyberbezpieczeństwo systemów automatyki (mgr inż. Stefan Bednarczyk) |
| 25 maja 2024 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Egzamin z „Teorii sterowania”; Omówienie wyników egzaminu; Seminarium i projekt z zakresu pracy końcowej cz.2 (prof. dr hab. inż. Jerzy Świder) |
| 8 czerwca 2024 r. (sobota) EMT-Systems | 9:00 – 13:00 | Prezentacja i obrona pracy końcowej cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 22 czerwca 2024 r. (sobota) EMT-Systems | 9:00 – 13:00 | Prezentacja i obrona pracy końcowej cz.2 (prof. dr hab. inż. Jerzy Świder) Zakończenie studiów |
LABORATORIA
Prezentujmy opisy, zdjęcia i filmy z laboratoriów, w których będą prowadzone poszczególne zajęcia podczas Studiów Podyplomowych „Automatyzacja, robotyzacja i cyfryzacja procesów produkcyjnych„.
Przedmiot: Automatyzacja sterowania procesami
Laboratoria są wyposażone w nowoczesny sprzęt, funkcjonujący zgodnie ze standardami przemysłowymi, dostarczony przez uznanych, wiodących producentów. W trakcie zajęć z przedmiotu „Automatyzacja sterowania procesami” będą dostępne takie urządzenia, jak:
- sterowniki PLC Siemens SIMATIC S7-1500 z zadajnikami sygnałów,
- oprogramowanie TIAPortal, w wersji V17,
- stanowiska wykonawcze, umożliwiają wykonywanie ćwiczeń w oparciu o rzeczywiste elementy, stosowane w automatyce przemysłowej,
- oprogramowanie Codesys3.5 i GX Works 2,
- sterowniki PLC Mitsubishi i Wago.
Standard realizacji ćwiczeń to jedna lub co najwyżej dwie osoby przy kompletnie wyposażonym stanowisku laboratoryjnym.




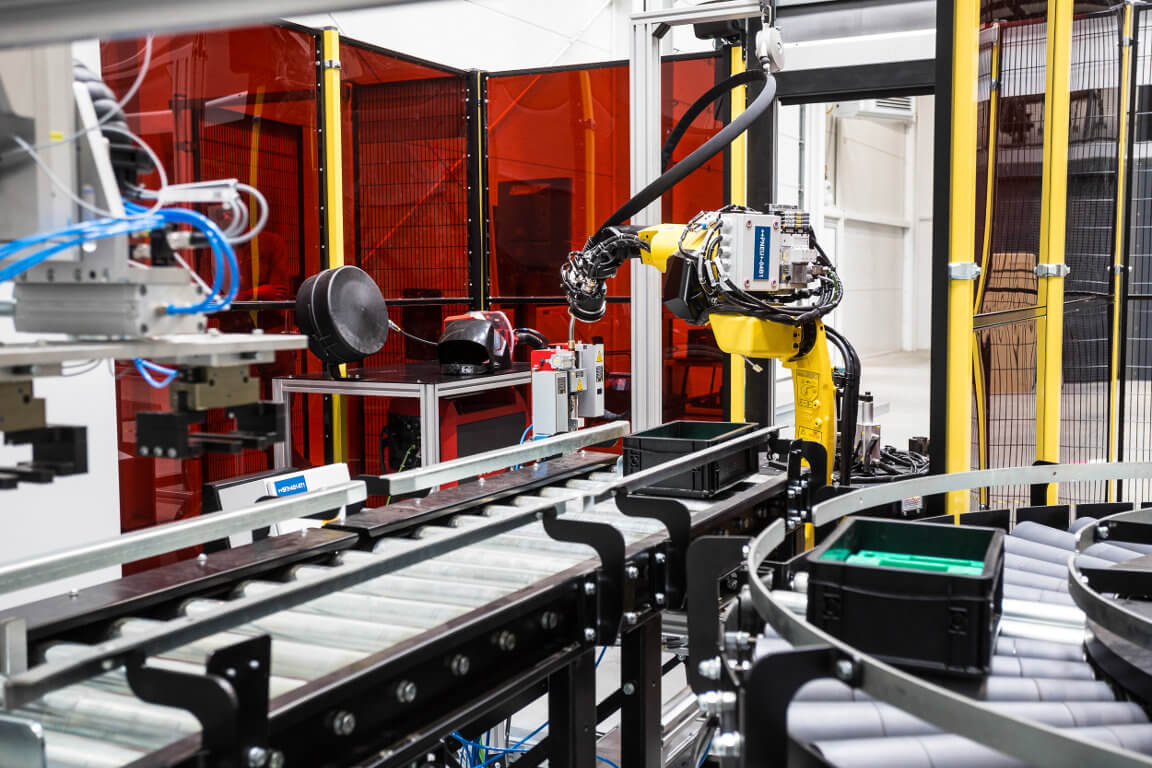
Przedmiot: Roboty przemysłowe w aplikacjach produkcyjnych – KUKA, FANUC, ABB, YASKAWA
Podczas zajęć z zakresu programowania i obsługi robotów wykorzystujemy autorskie, profesjonalne stanowiska zrobotyzowane, w skład których wchodzi 20 robotów przemysłowych typu:
- FANUC LR Mate 200iD 4s z kontrolerem R-30iB Mate,
- FANUC A-520i – przeznaczony do zastosowań związanych z przenoszeniem i montażem,
- ABB IRB 120 z kontrolerem IRC5 RW 6
- ABB IRB 1200 z kontrolerem IRC5 RW 6
- ABB IRB 2400 z kontrolerem IRC5 RW 5
- ABB IRB 6640 z kontrolerem IRC5 RW 5
- KUKA KR10 R1420 – CYBERTECH NANO,
- KUKA KR6 R900 SIXX z serii KR AGILUS,
- KUKA KR6 R700 SIXX z serii KR AGILUS,
- Yaskawa MOTOMAN seria GP8.




Przedmiot: Przemysłowe sieci komunikacyjne – PROFINET, PROFIBUS, AS-I, Ethernet
Stanowiska sieciowe, wykorzystywane podczas zajęć, są zbudowane z urządzeń wielu producentów. Pozwalają one Uczestnikom zapoznać się w trakcie ćwiczeń z różnymi sposobami konfiguracji i diagnozowania odmiennych typów elementów sieciowych. Stanowiska laboratoryjne składają się z następujących elementów:
- sterowniki Siemens SIMATIC S71500,
- sterowniki Siemens SIMATIC S7-1200 oraz panel HMI KTP700,
- programatory z oprogramowaniem TIAPortal v17,
- Sinamics V90: Przekształtnik + silnik serwo,
- wielofunkcyjne systemy wejść/wyjść ET 200S,
- panele SIMATIC HMI KTP8,
- switche Scalance X204IRT,
- switche SCALANCE XB005,
- systemy pozycjonowania absolutnego Pepperl-Fuchs PXV + taśma kodowa DataMatrix,
- rozproszone układy wejść/wyjść Lumberg 980 ESL 109 oraz 980 ESL 303,
- zdecentralizowane systemy magistrali I / O LioN-Link 940 ESL 601 oraz moduły 8x IN/OUT, 4x AI 0-10V,
- rozproszone wejścia/wyjścia Balluff BNI PNT 502 oraz BNI PNT 302.
Przedmiot: Wizualizacja procesów przemysłowych – systemy SCADA
Laboratoria są wyposażone w nowoczesny sprzęt, funkcjonujący zgodnie ze standardami przemysłowymi, dostarczony przez uznanych, wiodących producentów. Uczestnicy zajęć mają do dyspozycji stanowiska przeznaczone do nauki i rozwiązywania zadań przemysłowych, z zastosowaniem oprogramowania WinCC Professional TIAPortal v17 oraz sterowników Siemens SIMATIC S7-1500.
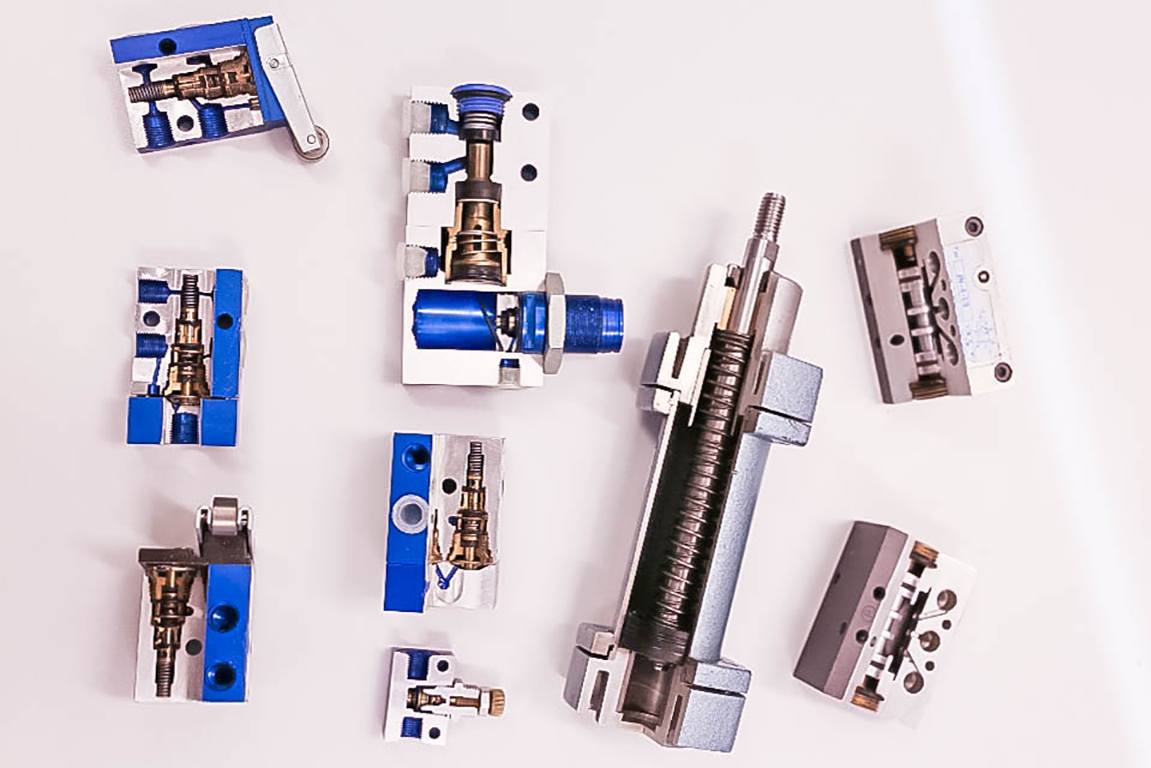
Przedmiot: Elementy i układy sterowania pneumatycznego
Stanowiska dla Uczestników zostały specjalistycznie wyposażone. Uczestnicy mają dostęp do stacji komputerowych z oprogramowaniem symulacyjnym, najnowszych katalogów produktowych, przekrojów komponentów pneumatyki, bogato wyposażonych laboratoriów, przeznaczonych do wykonywania ćwiczeń praktycznych.


Przedmiot: Napędy i sterowania w hydraulice siłowej
Sale i laboratoria szkoleniowe zapewniają Uczestnikom możliwość pracy na przemysłowych komponentach i układach hydrauliki siłowej najpopularniejszych producentów, takich jak PARKER Hannifin, BOSCH Rexroth, Manuli Fluiconnecto, HYDAC oraz PONAR WADOWICE.
Podczas praktycznych zajęć wykorzystujemy różnorodne stanowiska szkoleniowe.




Przedmiot: Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0
Centrum Testowania Technologii Przemysłu 4.0 to showroom przemysłowy, zaprojektowany, wykonany i prowadzony przez APA GROUP, dostawcy nowoczesnych rozwiązań z zakresu inteligentnej automatyki przemysłowej i systemów zarządzania budynkami, który pozwala zapoznać się z bliska z procesami produkcji w standardach Przemysłu 4.0. Do projektu showroomu zostały zaproszone czołowe organizacje, reprezentujące polską i światową gospodarkę, edukację i przemysł. Duży przekrój prezentowanych na stacji rozwiązań gwarantuje obszerną dawkę wiedzy i unikatową bazę edukacyjną z zakresu Przemysłu 4.0. SZCZEGÓŁOWY OPIS.



KADRA DYDAKTYCZNA
Zajęcia na studiach podyplomowych ARiCPP poprowadzą jedni z najlepszych ekspertów w regionie z poszczególnych dziedzin automatyki przemysłowej, posiadający wieloletnie doświadczenie w zakresie prac wdrożeniowo-inżynierskich, dydaktyki, a także prowadzenia zajęć i szkoleń przemysłowych.
Prof. dr hab. inż. Jerzy Świder
Kierownik studiów podyplomowych Automatyzacja, robotyzacja i cyfryzacja procesów produkcyjnych. Twórca i wieloletni dyrektor Instytutu Automatyzacji Procesów Technologiczny i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechnika Śląska. Dziekan dwóch kadencji Wydziału Mechanicznego Technologicznego. Wychowawca wielu pokoleń inżynierów i magistrów inżynierów mechaników, automatyków oraz opiekun i promotor wielu pracowników naukowych. Autor licznych książek i publikacji naukowych w dziedzinie inżynierii mechanicznej i automatyzacji. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmioty:
- Podstawy automatyki przemysłowej – 10h
- Teoria sterowania – 10h
- Seminarium z zakresu przygotowywania pracy końcowej – 10h
- Seminarium i projekt z zakresu pracy końcowej; artykuł z obszaru implementacji automatyki przemysłowej – 20h

Dr hab. inż. Mariusz Hetmańczyk
Profesor Politechniki Śląskiej, pracuje w Katedrze Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechniki Śląskiej. Ekspert Platformy Przemysłu Przyszłości, który od wielu lat zajmuje się zagadnieniami związanymi z przemysłem 4.0, automatyką i robotyką, sterowaniem, mechatroniką, diagnostyką przemysłową, predykcją stanów bazującej na metodach grafowych oraz technologiami MEMS. Autor ponad 80 publikacji związanych z komputerowym wspomaganiem diagnozy oraz prognozy rozproszonych napędów mechatronicznych. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Metodologia TPM w automatyce przemysłowej – 10h

Dr hab. inż. Andrzej Wróbel
Profesor Politechniki Śląskiej, pracuje w Katedrze Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechniki Śląskiej. Projektant układów sterowania oraz maszyn przemysłowych. Autor i współautor licznych prac naukowych i dydaktycznych z zakresu mechatroniki, automatyki przemysłowej i mechaniki maszyn. Prelegent krajowych i międzynarodowych konferencji naukowych. Kierownik i uczestnik prac badawczych z zakresu szeroko pojętej mechatroniki. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Elementy i układy sterowania pneumatycznego – 10h

Dr Andrzej Soldaty
Dyrektor Centrum Przemysłu 4.0 Politechniki Śląskiej. Swoją karierę zawodową związał z obszarem automatyki przemysłowej. Kierował Działem Robotyzacji w firmie ROBRA „Chemoautomatyka”. Pracował dla Festo, dostawcy rozwiązań i komponentów dla automatyki przemysłowej. Uczestniczył w budowie i rozwoju firmy Festo w Polsce, prowadził również projekty międzynarodowe na obszarze Europy Środkowo-Wschodniej. W latach 2010-2015 był Prezesem Zarządu Festo sp. z o.o. Od czerwca 2016 do marca 2019 był ekspertem w Zespole ds. Transformacji Przemysłowej powołanego przy Ministerstwie Rozwoju. W okresie od marca 2019 do grudnia 2020 był Prezesem Zarządu Fundacji Platforma Przemysłu Przyszłości. Z wykształcenia mechanik i automatyk. Ukończył również studia doktoranckie z ekonomii w Instytucie Nauk Ekonomicznych PAN. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Wsparcie i finansowanie procesów cyfryzacji i automatyzacji – 5h

Dr inż. Piotr Michalski
Doktor nauk technicznych, specjalista z zakresu budowy i eksploatacji maszyn, czujników i sieci przemysłowych oraz napędów elektrycznych, z 24-letnim doświadczeniem przemysłowym. Posiada certyfikowane kwalifikacje z zakresu integrowania systemów automatyki, między innymi takich firm jak: Siemens, ifm electronic, Mitsubishi Electric, Balluff, GE, Festo, SEW Eurodrive oraz B&R. Główny obszar zainteresowań naukowych to współczesne interfejsy komunikacyjne czujników przemysłowych oraz systemy IIoT do predykcyjnego utrzymania pracy maszyn i urządzeń przemysłowych. Jako pracownik naukowo dydaktyczny Politechniki Śląskiej, posiada doświadczenie, które w pracy dydaktycznej przekłada się na wspaniały kontakt z kursantami. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Automatyzacja sterowania procesami – PLC Codesys – 10h

Mgr inż. Marcin Podsiadły
Programista systemów sterowania, specjalizujący się w programowaniu sterowników PLC w środowisku SIEMENS TIA Portal. Wiedzę i praktyczne umiejętności zdobywał w trakcie tworzenia i uruchamiania nowych instalacji, zarówno w kraju, jak i za granicą, gdzie do jego obowiązków należało programowanie sterowników PLC i paneli operatorskich HMI, konfiguracja urządzeń automatyki oraz praca z sieciami przemysłowymi. Doświadczenie zdobywał także w trakcie pracy w dziale Badań i Rozwoju przy projektowaniu systemów nawigacji automatycznych wózków samojezdnych AGV. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Automatyzacja sterowania procesami – PLC Siemens / TIAPortal – 10h
- Automatyzacja sterowania procesami – PLC Mitsubishi /GX Works 2 – 10h
- Zastosowania paneli operatorskich HMI – 10h

Dr inż. Dominik Rabsztyn
Adiunkt w Katedrze Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechniki. Konstruktor hydrostatycznych układów napędowych i ekspert w zakresie diagnostyki maszyn. Autor oraz współtwórca ponad 30 artykułów naukowo-technicznych z zakresu napędów i sterowań hydraulicznych, budowy i eksploatacji maszyn oraz symulacji komputerowych. Wyróżniony Stypendium Funduszu Stypendialno-Stażowego na Rzecz Rozwoju Transferu Wiedzy w Regionie. Odbył staże naukowe na Uniwersytecie Technicznym w Chemnitz. Prelegent na konferencjach i seminariach związanych z eksploatacją i diagnostyką maszyn. Wieloletni praktyk oraz innowator w zakresie hydrostatycznych układów napędowych. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Napędy i sterowania w hydraulice siłowej – 10h

Mgr inż. Tomasz Nowak
Specjalista z zakresu programowania, uruchomiania oraz ustawiania stacji zrobotyzowanych. Posiada kilkunastoletnie doświadczenie przemysłowe w zakładach zajmujących się bezpośrednio nadzorem nad procesem zgrzewania, klejenia i spawania karoserii samochodowych, a także budowy stacji zrobotyzowanych. Koordynator i trener szkoleń z zakresu programowania robotów FANUC, KUKA, Yaskawa. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów KUKA
- Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów YASKAWA

Mgr inż. Wojciech Szulc
Autor pierwszej platformy szkoleniowej z zakresu robotów przemysłowych w EMT-Systems. Robotyk integrator, działający na projektach linii zrobotyzowanych dla JLR: Discovery, Defender. Daimler: S-Class, C-class, Sprinter, VW: Arteon Shooting break, ID.3, VIBN VW T7. Przeprowadził liczne uruchomienia stanowisk zrobotyzowanych na robotach ABB oraz KUKA, pomiary baz i narzędzi robotów z wykorzystaniem trackera pomiarowego Leica, optymalizacje czasu cyklu, ekspertyzy, oraz certyfikacje CE. Od 6 lat prowadzi również szkolenia z zakresu programowania robotów ABB i od niedawna KUKA w centrum szkoleń inżynierskich EMT-Systems w formie stacjonarnej i on-line. Poprowadzi przedmiot:
- Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów ABB

Mgr inż. Andrzej Kasprzycki
Ekspert automatyk z ponad dwudziestoletnim doświadczeniem, zdobytym przy uruchamianiu rozległych instalacji automatyki przemysłowej, a także w utrzymaniu ruchu dużych linii produkcyjnych, w tym pierwszej instalacji PCS7 w Polsce. Absolwent wydziału Automatyki, Elektroniki i Informatyki Politechniki Śląskiej. W pracy zawodowej programista PLC oraz SCADA, który ma za sobą wiele kompleksowych projektów oraz modernizacji systemów automatyki. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Wizualizacja procesów przemysłowych – systemy SCADA – 10h

Dr inż. Julian Malaka
Doktor inżynier, absolwent Wydziału Mechanicznego Technologicznego Politechniki Śląskiej. Jest zaangażowany w prace Fundacji Platformy Przemysłu Przyszłości jako ekspert w dziedzinie robotów autonomicznych. Ma duże doświadczenie w realizacji projektów dotyczących głównie automatyzacji i robotyzacji procesów technologicznych oraz techniki napędowej. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Wybrane, elektryczne systemy napędowe w przemyśle – 10h

Mgr inż. Stefan Bednarczyk
Elektronik, projektant systemów informatycznych, specjalista ds. cyberbezpieczeństwa przemysłowego, kierownik działu technicznego Tekniska Polska. Certyfikowany ekspert z zakresu cyberbezpieczeństwa przemysłowego: GIAC GICSP (Global Industrial Cyber Security Professional). Certyfikaty dot. administracji sieciami: Certified StormShield Network Administrator (CSNA), Cisco CCNA. Szkolenia: CEH v10 (Certified Ethical Hacker), Cisco CCNP. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmioty:
- Cyberbezpieczeństwo systemów automatyki – 10h
- Cyberbezpieczeństwo systemów informatycznych – 5h

Mgr inż. Karol Franc
Posiada wieloletnie doświadczenie zawodowe z zakresu programowania, uruchamiania stacji zrobotyzowanych oraz konfigurowania stref bezpieczeństwa robotów FANUC, ABB, KUKA w największych zakładach branży motoryzacyjnej na terenie Polski i poza jej granicami. Specjalista w uruchamianiu systemów PickMaster oraz iRPickTool. Aktywny zawodowo trener z zakresu programowania robotów FANUC. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmioty:
- Roboty przemysłowe w aplikacjach produkcyjnych budowa i programowanie robotów FANUC

Dr inż. Sebastian Temich
Doktor inżynier w dyscyplinie automatyka, elektronika i elektrotechnika. Specjalista w obszarach sztucznej inteligencji i uczenia maszynowego w zastosowaniu przemysłowym w APA Sp z o.o. W codziennej pracy skupia się na wykorzystaniu metod sztucznej inteligencji w diagnostyce prewencyjnej procesów produkcyjnych. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0 – 10h

mgr inż. Jacek Kucharczyk
Specjalista i pasjonat w dziedzinie systemów IOT i BigData w APA Sp. z o.o. Prowadzi projekty z zakresu przetwarzania dużych zbiorów danych. Absolwent Wydziału AEI Politechniki Śląskiej na kierunku Informatyka. Prowadzi wykłady dla studentów studiów dziennych jak i MBA. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0 – 10h

OPŁATY I BONUSY
Ważne informacje dla Uczestnika Studiów Podyplomowych ARiCPP
Informacje podstawowe:
- Koszt uczestnictwa: 14400 zł / osoba.
- Czas trwania Studiów Podyplomowych ARiCPP: 2 semestry.
- Łączna liczba godzin zajęć kontaktowych: 220h
- Łączna liczba dni prowadzenia zajęć kontaktowych: 22
- Każdy uczestnik otrzymuje dodatkowo Voucher o wartości 3000 zł netto na szkolenia w EMT-Systems
- Kandydatem na studia podyplomowe może być osoba, która posiada kwalifikację pełną co najmniej na poziomie szóstym PRK, uzyskaną w systemie szkolnictwa wyższego i nauki (studia pierwszego stopnia, studia drugiego stopnia, jednolite studia magisterskie).
Informacje dodatkowe:
- Dni odbywania się zajęć: soboty i niedziele.
- Jedyne w Polsce studia, umożliwiające praktyczną, indywidualną realizację ćwiczeń z wykorzystaniem kompleksowo wyposażonych stanowisk szkoleniowych, robotów przemysłowych, demonstratorów technologii, aktualnych, licencjonowanych wersji oprogramowania inżynierskiego.
- Zajęcia są prowadzone przez pracowników naukowo-dydaktycznych Politechniki Śląskiej oraz inżynierów praktyków, projektantów i integratorów systemów automatyki.
- Absolwenci Studiów Podyplomowych ARiCPP nabędą kompleksową wiedzę z zakresu najnowocześniejszych trendów w automatyce przemysłowej, zdobędą wiedzę z zakresu wykorzystania i posługiwania się specjalistycznym oprogramowaniem, a także będą przygotowani do prowadzenia nadzoru nad złożonymi systemami produkcyjnymi, działającymi zgodnie ze standardami Przemysłu 4.0.
PARTNERZY
W organizacji i prowadzeniu zajęć wspierają nas następujący Partnerzy i Patroni studiów ARiCPP
Siemens AG jest globalnym liderem technologicznym, który łączy świat cyfrowy z fizycznym, oferując dzięki temu liczne korzyści swoim klientom oraz całemu społeczeństwu. Spółka koncentruje swoje działania na inteligentnej infrastrukturze dla budynków, zdecentralizowanych systemach energetycznych, automatyzacji i cyfryzacji przemysłu przetwórczego i produkcyjnego, a także na inteligentnych rozwiązaniach mobilnych dla branży transportu drogowego i kolejowego.
Lider na rynku inteligentnej automatyki przemysłowej i systemów zarządzania budynkami. Firma posiada 20 lat doświadczenia i dziesiątki udanych wdrożeń dla instytucji, osób prywatnych, gmin i zakładów przemysłowych na całym świecie. APA to kompleksowe podejście do biznesu – od zarządzania i automatyzacji budynków oraz procesów przemysłowych, po efektywne zarządzanie energią. APA Group działa wszędzie tam, gdzie trzeba oswoić technologię i uczynić ją bardziej użyteczną.

Transmisji Danych i Cyberbezpieczeństwa w OT. Niemal 20 lat doświadczenia, prawie 4000 zadowolonych klientów, ponad 70.000 urządzeń dostarczonych na polski rynek, w tym, do najbardziej wymagających i newralgicznych instalacji infrastruktury krytycznej. W sieciach przemysłowych [OT/ICS] i ich cyberbezpieczeństwie pracownicy firmy są ekspertami. Wykonują usługi wdrożenia, doradzają, dostarczają rozwiązania, pomagające realizować konkretne potrzeby w projektach automatyki przemysłowej.
W zakresie działalności Centrum Przemysłu 4.0 Politechniki Śląskiej mieści się prowadzenie działalności badawczej, wdrożeniowej, szkoleniowej i edukacyjnej a także opracowywanie i rozwój innowacyjnych technologii Przemysłu 4.0. To również generowanie know-how oraz własności intelektualnej, pozyskiwanie aparatury umożliwiającej prowadzenie badań i działalności edukacyjnej w celu podnoszenia wiedzy praktycznej polskiej kadry specjalistycznej.
Katowicka Specjalna Strefa Ekonomiczna (KSSE) to w ostatnich latach najlepsza strefa w Polsce, Europie i nr 2 na świecie, według Financial Times. Działa tu blisko 540 firm, które zainwestowały już ponad 44 mld zł i utworzyły 90 tys. miejsc pracy. Inicjatywą KSSE realizowaną na rzecz przedsiębiorstw działających w branży motoryzacyjnej oraz zaawansowanych technologii jest Klaster „Silesia Automotive & Advanced Manufacturing” (SA&AM), którego celem jest zbudowanie silnej platformy wymiany i współpracy między przedsiębiorstwami a instytucjami edukacyjnymi i naukowymi.

DYPLOMY I CERTYFIKATY
Uczestnicy Studiów Podyplomowych ARiCPP, po pozytywnym zaliczeniu planowanych egzaminów i obronie pracy końcowej, otrzymują następujące świadectwa i certyfikaty:
- Świadectwo ukończenia studiów wydane przez Politechnikę Śląską. Wzór zawiera niezbędne elementy świadectwa ukończenia studiów podyplomowych określone odrębnymi przepisami. Studia podyplomowe na Politechnice Śląskiej są prowadzone na podstawie obowiązujących przepisów, a w szczególności ustawy z dnia 20 lipca 2018 r. – Prawo o szkolnictwie wyższym i nauce (j.t. Dz. U. z 2020 r. poz. 85, z późn. zm.), Statutu Politechniki Śląskiej, Regulaminu studiów podyplomowych Politechniki Śląskiej.
- Certyfikat wydany przez EMT-Systems Centrum Szkoleń Inżynierskich.
- Dyplom ukończenia studiów wydany przez Siemens Digital Industries.
- Certyfikat wydany przez Tekniska Polska Przemysłowe Systemy Transmisji Danych Sp. z o. o.
- Certyfikat wydany przez APA Sp. z o.o.



KONTAKT i REKRUTACJA
Oficjalne zapisy zostaną uruchomione w czerwcu w serwisie rekrutacyjnym Politechniki Śląskiej.
Kierownik Studiów Podyplomowych ARiCPP:
- prof. dr hab. inż. Jerzy Świder
- jerzy.swider@polsl.pl
- tel.: 32 237 27 59 oraz 608 552 400
Koordynator Studiów Podyplomowych ARiCPP z ramienia EMT-Systems Centrum Szkoleń Inżynierskich:
- Piotr Podgórski, Dyrektor ds. Planowania, Organizacji i Rozwoju Produktu
- piotr.podgorski@emt-systems.pl
- tel. 505 439 465
