
STUDIA PODYPLOMOWE
Edycja 1 – 2022/2023 ZAKOŃCZONA
AUTOMATYZACJA, ROBOTYZACJA I CYFRYZACJA PROCESÓW PRODUKCYJNYCH (ARICPP)
AKTUALNOŚCI PROGRAM TERMINARZ LABORATORIA KADRA OPŁATY I BONUSY PARTNERZY DYPLOMY I CERTYFIKATY KONTAKT i REKRUTACJA
AKTUALNOŚCI
06.06.2023
Zakończenie obron prac na studiach podyplomowych ARiCPP
Za nami obrony prac końcowych na studiach podyplomowych Automatyzacja, Robotyzacja i Cyfryzacja Procesów Produkcyjnych. 27 maja i 3 czerwca, w siedzibie firmy EMT-Systems Centrum Szkoleń Inżynierskich w Gliwicach do obrony przystąpili wszyscy uczestnicy tych studiów. Prace spełniały założone kryteria i dokumentowały wysoki poziom merytoryczny ich tematyki, mieszczącej się w obszarze automatyzacji, robotyzacji i cyfryzacji procesów produkcyjnych. ...
Obrony były nietypowe jak na akademickie standardy. Wszyscy słuchacze przygotowywali pracę z obszaru automatyki przemysłowej i sterowania. Następnie prezentowali ją przed całą grupą słuchaczy oraz kierownikiem kierunku.
Prof. dr hab. inż. Jerzy Świder, Kierownik Studiów Podyplomowych, zdecydował się być promotorem wszystkich prac dla tego eksperymentalnego rocznika. W kolejnych semestrach będą to również promotorzy z poszczególnych specjalizacji.
W ten sposób, po 9 miesiącach prowadzonych zajęć oraz dwudniowej sesji obron, mającej charakter i poziom konferencji naukowej studentów studiów doktoranckich, 22 Uczestników studiów podyplomowych ARiCPP wypełniło wszystkie wymagania, konieczne do uzyskania świadectwa ukończenia studiów prowadzonych przez Wydział Mechaniczny Technologiczny Politechniki Śląskiej i firmę EMT-Systems Centrum Szkoleń Inżynierskich.
Uroczyste wręczenie świadectw i dyplomów oraz przyjęcie do grona Absolwentów Uczelni zaplanowano na początek lipca.
Serdecznie dziękujemy uczestnikom, prowadzącym zajęcia, przedstawicielom Politechniki Śląskiej reprezentowanym przez prof. Annę Timofiejczuk, prof. Jerzego Świdra oraz partnerom – Siemens, TEKNISKA, APAGroup, Katowickiej Specjalnej Strefie Ekonomicznej, Klastrowi Silesia Automotive & Advanced Manufacturing.
Trwa rekrutacja na 2 edycję studiów. Wszystkie szczegóły na stronie – Studia podyplomowe ARiCPP Edycja 2023/24




01.09.2022
Kolejny zjazd słuchaczy Studiów Podyplomowych ARiCPP
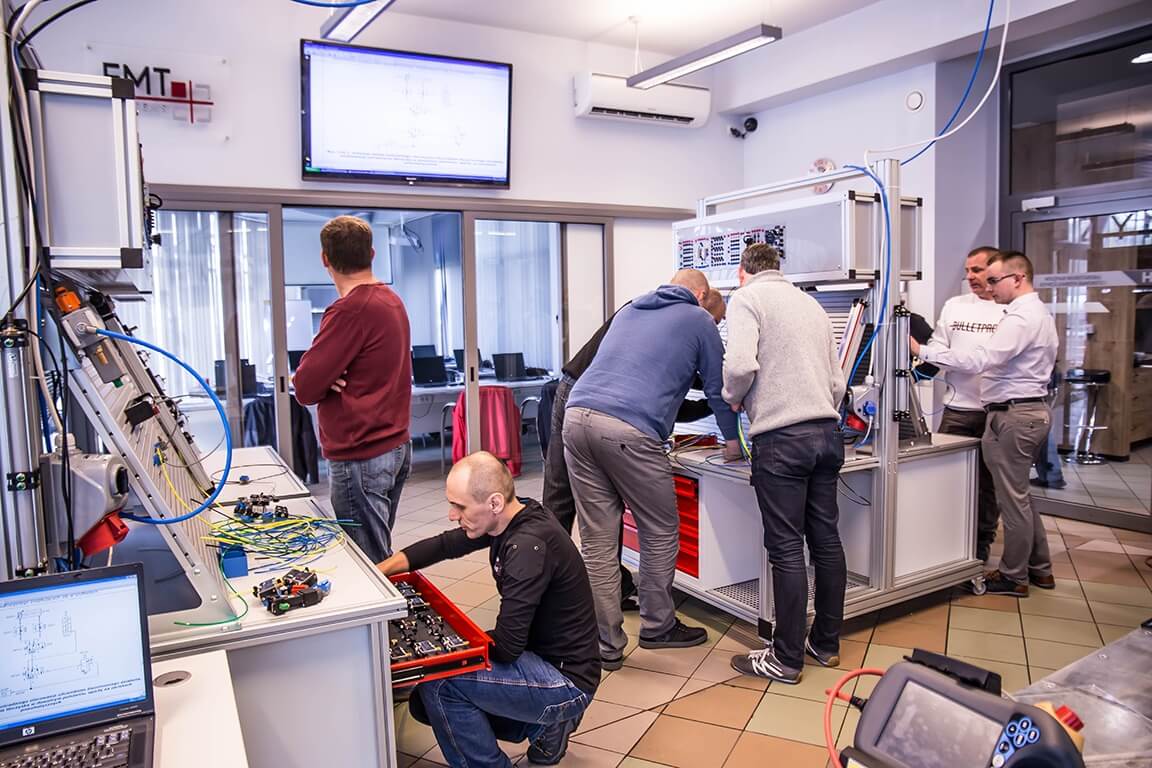
Za nami kolejne zajęcia dla słuchaczy Studiów Podyplomowych Automatyzacja, Robotyzacja i Cyfryzacja Procesów Produkcyjnych. Uczestnicy wzięli udział w wykładzie z zakresu podstaw automatyki przemysłowej, podczas którego zestawiono powszechnie znane zagadnienia automatyki praktycznej ze źródłem tej dziedziny – pojęciami transmitancji operatorowej i widmowej, przekształceń Laplace’a, algebry grafów przepływu sygnałów, analizy widmowej czy klasyfikacji regulatorów....
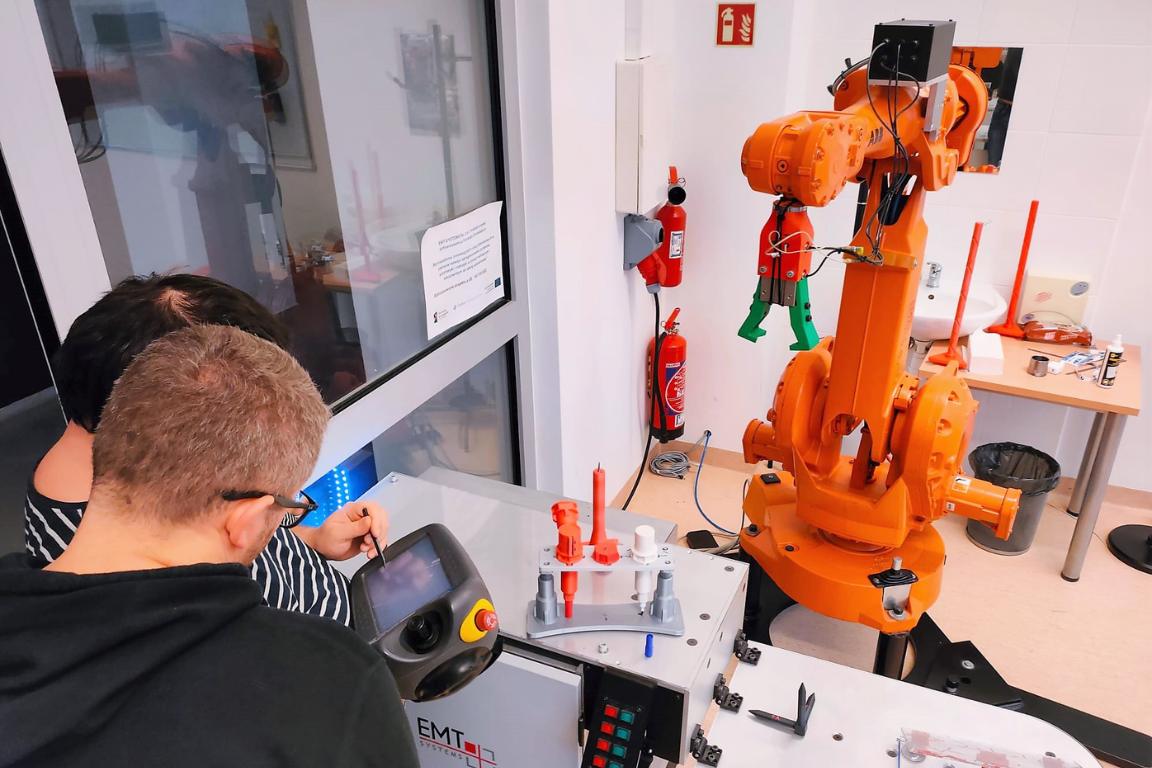
Drugi wykład dotyczył praktycznych zagadnień z zakresu pneumatyki przemysłowej, słuchacze mieli również możliwość wykonania różnych ćwiczeń obejmujących programowanie robotów KUKA i ABB.



01.09.2022
Inauguracja i pierwsze zajęcia ARiCCP
W sobotę 8 października odbyła się inauguracja oraz pierwsze zajęcia w ramach Studiów Podyplomowych Automatyzacja, Robotyzacja i Cyfryzacja Procesów Produkcyjnych. Uroczyste rozpoczęcie, poprowadzone przez prof. Annę Timofiejczuk, Dziekan Wydziału Mechanicznego Technologicznego Politechniki Śląskiej oraz prof. Jerzego Świdra, Kierownika Studiów ARiCPP, odbyło się w Sali Posiedzeń na Wydziale MT. ...
Podczas prezentacji uczelni i wydziału, studenci mieli okazję zapoznać się z wszystkimi niezbędnymi informacjami organizacyjnymi. EMT-Systems reprezentował Piotr Podgórski, który podczas spotkania przedstawił kadrę wykładową, rekomendowaną i współtworzoną przez nasze centrum. W inauguracji wzięli również udział przedstawiciele patronów studiów – Tekniska Polska, APA Group, Siemens Polska, Centrum Przemysłu 4.0 Politechniki Śląskiej oraz Katowickiej Specjalnej Strefy Ekonomicznej.
Po inauguracji 24-osobowa grupa słuchaczy przeniosła się do siedziby EMT-Systems, gdzie odbyły się pierwsze zajęcia z zakresu programowania sterowników PLC Mitsubishi oraz Simens SIMATIC S7-1500.
Organizacja studiów ARiCCP jest wynikiem wspólnego pomysłu Rektora Politechniki Śląskiej prof. Arkadiusza Mężyka oraz Prezesa EMT-Systems prof. Grzegorza Wszołka.
Wszystkim słuchaczom życzymy powodzenia i wytrwałości w zdobywaniu wiedzy.








01.09.2022
Harmonogram – najważniejsze daty
- I tura naboru na studia ARICCP: 06 czerwca 2022, godz. 12:00 – 24 sierpnia 2022, godz. 15:00
- II tura naboru na studia ARICCP: 29 sierpnia 2022, godz. 12:00 – 28 września 2022, godz. 15:00
- Start naboru do projektu OPEN: 15 września 2022, godz. 10:00
- Rozpoczęcie studiów ARICCP: 8 października 2022, godz. 9:00 – 10:30
26.04.2022
Wyjątkowa propozycja Studiów Podyplomowych
Zapraszamy do zapoznania się z ofertą Studiów Podyplomowych z zakresu „Automatyzacji, robotyzacji i cyfryzacji procesów produkcyjnych”.
Jest to wyjątkowa oferta na rynku edukacyjnym, pierwsza tego typu w Polsce. Proponowane studia zostały opracowane w oparciu o doświadczenie dwóch instytucji – Politechniki Śląskiej oraz firmy szkoleniowej EMT-Systems Centrum Szkoleń Inżynierskich. Atuty wyróżniające naszą propozycję:...
- Uzyskanie Dyplomu Politechniki Śląskiej, państwowej, renomowanej, akademickiej uczelni badawczej.
- Uznani wykładowcy – doświadczeni nauczyciele akademiccy oraz szkoleniowcy z dużą praktyką przemysłową.
- Indywidualna realizacja wielu ćwiczeń praktycznych w nowoczesnych laboratoriach.
- Atrakcyjne i wyjątkowo ciekawe przedmioty odpowiadające potrzebom współczesnego rynku pracy.
- Wygodny i dostosowany do potrzeb osób pracujących terminarz realizacji zajęć.
- Wsparcie uznanych partnerów przemysłowych.
- 2 semestry, 22 dni nauki, 220 godzin zajęć, 20 uczestników w grupie.
- Wartościowe bonusy.
Oficjalne zapisy zostaną uruchomione w czerwcu w serwisie rekrutacyjnym Politechniki Śląskiej.
Zapraszamy już teraz do zgłaszania swojej kandydatury. Zarezerwujemy miejsce w tworzonej grupie i poinformujmy o rozpoczęciu oficjalnej rekrutacji.
Kierownik Studiów Podyplomowych ARiCPP:
- prof. dr hab. inż. Jerzy Świder
- jerzy.swider@polsl.pl
- tel.: 32 237 27 69 oraz 608 552 400
Koordynator Studiów Podyplomowych ARiCPP z ramienia EMT-Systems Centrum Szkoleń Inżynierskich:
- Piotr Podgórski, Dyrektor ds. Planowania, Organizacji i Rozwoju Produktu
- piotr.podgorski@emt-systems.pl
- tel. 505 439 465
PROGRAM
Prezentujemy wykaz przedmiotów prowadzonych podczas Studiów Podyplomowych „Automatyzacja, robotyzacja i cyfryzacja procesów produkcyjnych„.
Zapraszamy do rozwinięcia zakładki i zapoznania się ze szczegółami, dotyczącymi każdego przedmiotu.
SEMESTR 1 – Edycja 1
Zakres przedmiotu:
- Podstawowe pojęcia i określenia automatyki przemysłowej.
- Podział układów automatycznej regulacji. Układy otwarte i zamknięte.
- Sprzężenie zwrotne.
- Opis analityczny członów i układów automatycznej regulacji.
- Metody modelowania. Różniczkowe równania ruchu.
- Klasyfikacja wymuszeń.
- Przekształcenie Laplace’a.
- Podstawowe człony układów automatycznej regulacji: bezinercyjne, rzędu pierwszego, rzędu drugiego, całkujące, różniczkujące, opóźniające.
- Charakterystyki członów układów ar: statyczne, dynamiczne, czasowe, częstotliwościowe, amplitudowe i fazowe.
- Transmitancja operatorowa członu układu automatycznej regulacji.
- Schematy blokowe układów ar. Algebra schematów blokowych. Grafy przepływu sygnałów układów automatycznej regulacji. Algebra grafów przepływu sygnałów.
- Transmitancje operatorowe układów jednowymiarowych i wielowymiarowych.
- Podstawy analizy widmowej.
- Transmitancja widmowa układu.
- Klasyfikacja i opis obiektów sterowania.
- Regulatory. Struktura i podział regulatorów. Klasyfikacja regulatorów ciągłego działania: proporcjonalne, całkujące, proporcjonalno – całkujące, proporcjonalno – różniczkujące, proporcjonalno – całkująco – różniczkujące.
- Transmitancja operatorowa regulatora PID.
- Odpowiedź regulatora PID na zadany, standardowy, sygnał uchybu regulacji.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie teoretyczne podstawy automatyki, jako dziedziny nauki, zajmującej się zagadnieniami sterowania różnorodnymi procesami, głównie technologicznymi i przemysłowymi.
- Potrafi identyfikować oraz formułować werbalnie i matematycznie różnorodne problemy inżynierskie, związane z automatyką i robotyką przemysłową, poprzez zastosowanie zasad nauki i wiedzy inżynieryjno-technicznej.
- Potrafi modelować matematycznie systemy dynamiczne, w tym układy sterowania, a także dokonywać ich syntezy, analizy i optymalizacji w dziedzinie częstotliwości i w dziedzinie czasu.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Jest gotów samodzielnie poszerzać wiedzę z obszaru automatyki, niezbędną do świadomego projektowania i użytkowania układów zautomatyzowanych oraz rozumie potrzebę nieustannego prowadzenia takich studiów.
Prowadzący: Prof. Dr hab. inż. Jerzy Świder
Zakres przedmiotu:
- Idea sterowania procesów i maszyn w oparciu o sterownik PLC
- Pierwszy projekt w TIA Portal
- Podstawowa diagnostyka sterownika PLC
- Zasady tworzenia programów w języku drabinkowym LAD
- Operacje logiczne w sterowniku PLC
- Rodzaje obszarów pamięci sterownika
- Monitorowanie i testowanie programów
- Przekazywanie wartości pomiędzy parametrami
- Monitorowanie i modyfikowanie zmiennych
- Tworzenie backupów
- Archiwizacja projektu
- Formatowanie pamięci CPU
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- est gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Marcin Podsiadły
Zakres przedmiotu:
- Możliwości projektowania systemów sterowania z wykorzystaniem sterowników Mitsubishi MELSEC-Q
- Struktura środowiska GX Works 2
- Konfiguracja połączenia ze sterownikiem Q
- Parametryzacja CPU
- Adresacja modułów wejściowych i wyjściowych
- Podstawowe rozkazy budujące logikę programu sterującego
- Cykl pracy sterownika Q
- Możliwości wprowadzania komentarzy
- Narzędzia wspierające monitorowanie pracy sterownika
- Etykiety globalne i lokalne
- Praca ze zmiennymi binarnymi
- Diagnostyka błędów sterownika Q
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Marcin Podsiadły
Zakres przedmiotu:
- Podstawowe układy wykonawcze
- Zastosowanie logiki Boole'a w układach automatyki przemysłowej
- Podział na czujniki i urządzenia wykonawcze
- Automatyzacja procesów dyskretnych vs. procesów ciągłych
- Języki programowania układów sterujących
- Wprowadzenie do normy IEC 61131-3
- Zasady poprawnego kodowania w językach: IL, LD, FBD, SFC i ST
- Wprowadzenie do środowiska programowania CoDeSys v2.3
- Tworzenie i analiza programów sterujących oraz wizualizacji
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: dr inż. Piotr Michalski
Zakres przedmiotu:
- Bezpieczeństwo pracy przy i z robotem - procedury bezpiecznej pracy podczas programowania i pracy automatycznej.
- Panel operatora (KCP). Budowa i funkcje. Opcje dostępne w menu na poziomie operatora.
- Poruszanie manipulatorem przy pomocy przycisków kierunku i (układy współrzędnych, ruchy osiami manipulatora w trybie pracy ręcznej, wykonywanie programu).
- Wyznaczanie układów współrzędnych (narzędzia i bazy).
- Programowanie ścieżki pracy robota – ruchy PTP, LIN i CIRC.
- Ręczne i programowe sterowanie sygnałami cyfrowymi (OUT, PULSE).
- Parametryzacja instrukcji ruchu.
- Wykonywanie programu w trybie pracy ręcznej i automatycznej AUTO.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Tomasz Nowak
Zakres przedmiotu:
- Systemy bezpieczeństwa stosowane w robotyce przemysłowej
- Etapy uruchomienia produkcji zrobotyzowanej
- Bezpieczeństwo pracy z robotem - ogólne zasady
- Bezpieczna praca w trybie ręcznym
- Obsługa i kontrolki na elementach szafy robota
- Obsługa joysticka
- Przemieszczanie robota osiami
- Przemieszczanie robota liniowo i reorientacja
- Opis programowania robotów przemysłowych
- Struktura programu w języku RAPID
- Tworzenie własnych procedur
- Typy punktów ruchu
- Instrukcje ruchu osiami
- Instrukcje ruchu liniowego
- Parametryzowanie instrukcji ruchu
- Korygowanie pozycji
- Modyfikacja programów
- Testowanie wprowadzonych zmian
- Układ wejść i wyjść robota
- Podgląd wyjść wejść
- Backup Robota
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Wojciech Szulc
Zakres przedmiotu:
- Wstęp do przemysłowych sieci komunikacyjnych,
- Przegląd standardowych protokołów komunikacyjnych wykorzystywanych w przemyśle na przykładzie sieci:
- ProfiBus
- ProfiNET
- EtherCAT
- Modbus RTU i TCP
- ASi
- Zestawienie i porównanie standardów Profibus, ProfiNET, EtherCAT, Modbus, ASi
- Konfiguracja, wymiana danych oraz podstawy diagnostyki w sieciach:
- ProfiBus
- ProfiNET
- EtherCAT
- Modbus RTU i TCP
- ASi
- Możliwości rozwojowe przemysłowych sieci komunikacyjnych w ramach czwartej rewolucji przemysłowej Industry 4.0
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie ogólne działanie informacyjnych sieci przemysłowych PROFINET i PROFIBUS.
- Potrafi dokonać samodzielnej konfiguracji sieci PROFINET i PROFIBUS w zakresie podstawowym.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: Dr inż. Piotr Świszcz
Zakres przedmiotu:
- Systemy SCADA – wprowadzenie
- Konfiguracja SCADA
- Stworzenie nowego projektu dla sterownika i wizualizacji
- Konfiguracja sterownika S7-1500, z którego będą pobierane informacje do wizualizacji
- Konfiguracja połączenia wizualizacji ze sterownikiem PLC
- Konfiguracja zmiennych w wizualizacji WinCC
- Tworzenie ekranów wizualizacji, przełączanie między ekranami
- Obiekty graficzne na bazie których jest tworzona wizualizacja - dynamiczne zmiany wyglądu obiektów od wartości zmiennych procesowych
- Gotowe symbole graficzne, pola edycyjne, listy tekstowe i graficzne
- Podstawowe zdarzenia obiektów wizualizacji - reakcja na kliknięcie myszką w obiekt graficzny, podstawowe funkcje biblioteczne podłączane do zdarzeń
- Obsługa alarmów procesowych
- Obsługa archiwizacji zmiennych, przedstawienie wartości archiwalnych na wykresach czasowych
- Konfiguracja użytkowników systemu wizualizacji - zabezpieczenie przed dostępem dla osób nieuprawnionych
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC
- Zna i rozumie systemy archiwizacji i raportowania w oprogramowaniu typu SCADA.
- Zna i rozumie możliwości różnych paneli operatorskich i sterowników PLC.
- Potrafi tworzyć proste wizualizacje, weryfikujące poziomy dostępu do wybranych operacji.
- Potrafi utworzyć proste ekrany w oparciu o listy, obiekty Faceplate, skrypty VB, pętle.
- Potrafi skonfigurować podstawowy układ sterownika PLC i panelu operatorskiego HMI.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Jest gotów samodzielnie poszerzać wiedzę z obszaru automatyki, niezbędną do świadomego projektowania i użytkowania układów zautomatyzowanych oraz rozumie potrzebę nieustannego prowadzenia takich studiów.
Prowadzący: mgr inż. Andrzej Kasprzycki
Zakres przedmiotu:
- Wprowadzenie do Siemens TIAPortal.
- Tworzenie nowego projektu.
- Konfiguracja sterownika PLC S7-1200.
- Przygotowanie projektu TIA Portal dla panelu Basic.
- Wykorzystanie kreatora dla panelu HMI.
- Podstawowe elementy wizualizacji.
- Konfiguracja, edycja i tworzenie plansz.
- Animacje obiektów – Display (Appearance, Visibility) oraz Movement.
- Wykresy.
- Obsługa programu ProSave.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC
- Zna i rozumie systemy archiwizacji i raportowania w oprogramowaniu typu SCADA.
- Potrafi skonfigurować podstawowy układ sterowników PLC i paneli operatorskich HMI.
Prowadzący: mgr inż. Marcin Podsiadły
Zakres przedmiotu:
- Definicja pneumatyki, sterowania i napędu pneumatycznego.
- Podstawy fizyczne pneumatyki.
- Wady i zalety stosowania układów pneumatycznych w porównaniu do układów hydraulicznych czy elektrycznych.
- Symbolika i nazewnictwo elementów pneumatycznych.
- Budowa i podział sprężarek.
- Zasada działania i elementy składowe układu przygotowania powietrza.
- Zasady projektowania układów pneumatycznych.
- Budowa i działanie elementów sterujących: sterowanie kierunkiem przepływu; sterowanie ciśnieniem; sterowanie natężeniem przepływu medium roboczego.
- Pneumatyczne elementy wykonawcze w ruchu liniowym i obrotowym: tłokowe; membranowe; workowe i inne.
- Praktyczne zastosowanie elektropneumatyki w procesach technologicznych.
- Sterowanie pośrednie i bezpośrednie.
- Zasady BHP w pneumatyce.
- Zapis działania układu za pomocą cyklogramu działania i grafu.
- Analiza i synteza wybranych procesów technologicznych sterowanych pneumatycznie. Komputerowe programy wspomagające proces projektowania i symulacji układów.
- Sterowanie układów elektropneumatycznych z zastosowaniem sterownika programowalnych PLC.
- Podczas zajęć laboratoryjnych zostaną zrealizowane następujące tematy:
- automatyzacja wybranych procesów technologicznych,
- przeprowadzenie analizy działania zaprojektowanego układu,
- wykonanie dokumentacji utworzonego układu (cyklogram działania, graf, schemat układu),
- przeprowadzeni syntezy według założonego cyklogramu działania,
- komputerowa symulacja w programie FluidSIM,
- tworzenie złożonych funkcji sterujących z zastosowaniem logiki Boole’a
- minimalizacja funkcji Boolowskich, tworzenie tabeli stanów.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie teoretyczne podstawy automatyki, jako dziedziny nauki, zajmującej się zagadnieniami sterowania różnorodnymi procesami, głównie technologicznymi i przemysłowymi.
- Potrafi identyfikować elementy pneumatyczne i elektropneumatyczne stosowane w przemyśle.
- Potrafi zaprojektować dowolny układ pneumatyczny/ elektropneumatyczny.
Prowadzący: Dr hab. inż. Andrzej Wróbel
Zakres przedmiotu:
- Omówienie aktualnej struktury Politechniki Śląskiej, Wydziału Mechanicznego Technologicznego i Firmy EMT-Systems Centrum Szkoleń Inżynierskich. .
- Omówienie zasad zdobywania i posługiwania się tytułami zawodowymi, stopniami naukowymi, tytułem naukowym.
- Omówienie stanowisk i pełnionych na uczelniach wyższych funkcji.
- Przedstawienie zasad, dotyczących struktury pracy końcowej na studiach podyplomowych oraz jej edycji.
- Ochrona własności intelektualnej.
- Przygotowanie Uczestnika do prezentacji przed komisją wyników swojej pracy końcowej.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia związane ze strukturą Politechniki Śląskiej, Wydziału Mechanicznego Technologicznego i Firmy EMT-Systems Centrum Szkoleń Inżynierskich.
- Zna i rozumie zasad zdobywania i posługiwania się tytułami zawodowymi, stopniami naukowymi, tytułem naukowym.
- Zna zasady, dotyczące struktury pracy końcowej na studiach podyplomowych oraz zasady jej edycji.
- Rozumie konieczność ochrony własności intelektualnej innych autorów podczas tworzenia własnej pracy końcowej.
- Jest przygotowany do prezentacji przed komisją wyników swojej pracy końcowej.
Prowadzący: Prof. dr hab. inż. Jerzy Świder
SEMESTR 2 – Edycja 1
Zakres przedmiotu:
- Sterowalność i obserwowalność.
- Charakterystyki Nyquista i charakterystyki Bodego.
- Stabilność układów dynamicznych.
- Kryteria stabilności układów sterowania: Hurwitza, Michajłowa, Nyquista.
- Analiza stabilności otwartych i zamkniętych układów sterowania.
- Zmienne stanu. Fazowe zmienne stanu. Równia stanu.
- Modelowanie układów dynamicznych w przestrzeni stanów.
- Związek pomiędzy transmitancją operatorową a równaniami stanu.
- Transformacja transmitancji operatorowej do postaci równań stanu.
- Transformacja równań stanu do postaci transmitancji operatorowej.
- Analiza układu sterowania w dziedzinie czasu z zastosowaniem równań stanu.
- Jakość układów sterowania. Kryteria oceny jakości liniowych układów regulacji. Wskaźniki jakości.
- Statyczna dokładność liniowych układów regulacji.
- Uchyb w stanie ustalonym.
- Dynamiczna jakość liniowych układów regulacji. Ocena jakości regulacji poprzez: badanie parametrów odpowiedzi skokowej, kryteria całkowe, kryteria częstotliwościowe, metody miejsc geometrycznych biegunów transmitancji operatorowej.
- Zapas stabilności i jego ocena. Zapas modułu i zapas fazy.
- Opis układu regulacji z regulatorem PID oraz dobór jego parametrów, zgodnie z przyjętymi kryteriami jakości regulacji.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie teoretyczne podstawy automatyki, jako dziedziny nauki, zajmującej się zagadnieniami sterowania różnorodnymi procesami, głównie technologicznymi i przemysłowymi.
- Potrafi identyfikować oraz formułować werbalnie i matematycznie różnorodne problemy inżynierskie, związane z automatyką i robotyką przemysłową, poprzez zastosowanie zasad nauki i wiedzy inżynieryjno-technicznej.
- Potrafi modelować matematycznie systemy dynamiczne, w tym układy sterowania, a także dokonywać ich syntezy, analizy i optymalizacji w dziedzinie częstotliwości i w dziedzinie czasu.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Jest gotów samodzielnie poszerzać wiedzę z obszaru automatyki, niezbędną do świadomego projektowania i użytkowania układów zautomatyzowanych oraz rozumie potrzebę nieustannego prowadzenia takich studiów.
Prowadzący: Prof. dr hab. inż. Jerzy Świder
Zakres przedmiotu:
- Zasady bezpieczeństwa na stanowiskach zrobotyzowanych
- Podstawowe zasady bezpiecznej pracy z robotem przemysłowym
- Budowa robota przemysłowego (wiadomości podstawowe)
- iPendant – podstawowe funkcje
- Możliwości zastosowań robotów przemysłowych
- Sterowanie robotem w trybie manualnym
- Poruszanie robotem w trybie: joint, word, tool
- Programowanie on-line
- Tworzenie nowego i edycja istniejącego programu, zarządzanie programami
- Instrukcja ruchu i edycja jej parametrów
- Uruchamianie programu w trybie ręcznym
- Bezpieczne zatrzymanie, modyfikacja i ponowne uruchomienie programu robota
- Instrukcje programowe
- Pętle, etykiety
- Instrukcje warunkowe IF
- Obsługa wejść/wyjść
- Rejestry numeryczne
- Uruchomienie programu w trybie automatycznym
- Ręczna manipulacja punktem
- Backup programów i plików systemowych
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Karol Franc
Zakres przedmiotu:
- Bezpieczeństwo pracy przy i z robotem - procedury bezpiecznej pracy podczas programowania i pracy automatycznej.
- Panel operatora (KCP). Budowa i funkcje. Opcje dostępne w menu na poziomie operatora.
- Zasady bezpieczeństwa na stanowiskach zrobotyzowanych:
- Podstawowe zasady bezpiecznej pracy z robotem przemysłowym.
- Budowa robota przemysłowego (wiadomości podstawowe):
- Teach Pendant – podstawowe funkcje.
- Sterowanie robotem w trybie manualnym:
- Poruszanie robotem w trybie: joint, word, tool.
- Wejścia/Wyjścia – symulacja wejść i wystawianie wyjść.
- Programowanie on-line:
- Tworzenie nowego i edycja istniejącego programu.
- Typy ruchów robota, parametryzacja instrukcji ruchu.
- Uruchamianie programu w trybie ręcznym.
- Bezpieczne zatrzymanie, modyfikacja i ponowne uruchomienie programu robota.
- Uruchomienie programu w trybie automatycznym.
- Układy współrzędnych - tworzenie i modyfikacja:
- Narzędzia (Tool Frames).
- Użytkownika (User Frames).
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie podstawowe zasady konfigurowania stanowiska zrobotyzowanego, zawierającego niezbędne narzędzia oraz maszyny różnych producentów.
- Zna i rozumie podstawowe zasady konfigurowania narzędzi robota oraz maszyn, które robot obsługuje.
- Potrafi uruchamiać roboty przemysłowe różnych, wiodących producentów.
- Potrafi opisać konstrukcję i działanie układu robota dowolnego producenta.
- Potrafi programować robota dowolnego producenta on-line w podstawowym zakresie.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Tomasz Nowak
Zakres przedmiotu:
- Definicje i cechy napędów:
- Klasyczne napędy elektryczne.
- Serwonapęd, napęd mechatroniczny.
- Budowa i działanie silników elektrycznych:
- Silnik prądu stałego.
- Silnik prądu przemiennego.
- Moc elektryczna.
- Układy zasilania w przemysłowych napędach elektrycznych.
- Bezpośredni.
- Gwiazda-trójkąt.
- Softstart.
- Przemiennik częstotliwości (podstawowa konfiguracja w praktyce).
- Sterowanie w napędach elektrycznych z przemiennikiem częstotliwości:
- Automatyczna regulacja parametrów ruchu (tryb skalarny, tryb wektorowy).
- Czujniki w regulacji prędkości i pozycji.
- Hamowanie.
- Podstawowe zagadnienia z diagnostyki przemysłowych napędów elektrycznych
- Wielkości diagnostyczne.
- Monitorowanie i archiwizacja parametrów eksploatacyjnych za pomocą wykresów.
- Identyfikacja nieprawidłowości w układach z przemiennikiem częstotliwości.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń.
- Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie zasady sterowania procesami i maszynami z zastosowaniem sterowników logicznych PLC.
- Zna i rozumie zasady automatycznego sterowania urządzeń za pomocą sterowników logicznych oraz nowoczesnych przekształtników częstotliwości.
Prowadzący: mgr inż. Julian Malaka
Zakres przedmiotu:
- Maszyna w ujęciu systemowym.
- Narzędzia rozpoznawania stanów przebiegu procesu przemysłowego lub pracy maszyn.
- Podział metod diagnostyki.
- Zalecenia dotyczące pozyskiwania sygnałów diagnostycznych z maszyn. TPM - Total Productive Maintenance.
- Cele wprowadzenia TPM.
- Straty powodowane awariami oraz powody przestojów.
- TPM a TQM – różnice i podobieństwa.
- Metody eksploatacji.
- Wdrożenie TPM. Wskaźniki TPM. Etapy wdrażania TPM.
- Autonomiczne Utrzymanie Ruchu (ang. Autonomous Maintenance).
- Istotne elementy w monitorowaniu maszyn.
- Metoda ADMA w zastosowaniach związanych z TPM.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zasady sterowania procesami i maszynami w kontekście optymalizacji ich pracy oraz zarządzeniem cyklem życia.
- Zna i rozumie pojęcie Przemysłu 4.0 (Przemysłu Przyszłości), wirtualnego bliźniaka oraz wirtualnego uruchomienia.
- Zna i rozumie mechanizmy prawidłowego wdrożenia i stosowania metodologii TPM.
- Potrafi samodzielnie zdobywać wiedzę i rozwijać swoje profesjonalne umiejętności, korzystając z różnych źródeł (w języku rodzimym i obcym) i nowoczesnych technologii.
- Jest gotów animować działania w obszarze Przemysłu 4.0, wykorzystując różne modele biznesowe.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
- Potrafi pozyskiwać informacje z literatury i innych źródeł na temat nowych technologii, oceniać je, selekcjonować i wykorzystywać.
Prowadzący: Dr hab. inż. Mariusz Hetmańczyk
Zakres przedmiotu:
- Sieci przemysłowe, proces i komponenty ICS
- Omówienie komponentów sieci przemysłowej
- Wstęp do modelu PERA
- Wprowadzenie do sieci przemysłowych opartych o Ethernet
- Sieciowy model ISO/OSI i protokoły natywne dla każdej warstwy
- Komunikacja w sieci Ethernet – podstawy
- Komunikacja w warstwach wyższych L3 i L4
- Przegląd protokołów przemysłowych
- Ataki na systemy przemysłowe
- Podatności w protokołach i komponentach ICS
- ICS Kill Chain – fazy ataku i przykłady udanych ataków
- Możliwości działań defensywnych
- Architektura
- Ochrona pasywna
- Ochrona aktywna
- Działania wywiadowcze
- Działania ofensywne
- Aktywny cykl działań cyberbezpieczeństwa
- Przegląd norm i dobrych praktyk
- Standard IEC 62443
- Ustawa o KSC, materiały RCB
- Ćwiczenia 1 - Inwentaryzacja zasobów systemów ICS
- Ćwiczenia 2 – Monitorowanie bezpieczeństwa sieci
- Ćwiczenia 3 – Bezpieczna architektura ICS
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie zasady bezpieczeństwa cybernetycznego sieci przemysłowych.
- Potrafi uruchomić monitorowanie infrastruktury sieciowej w systemie IDS.
- Potrafi wykorzystać wiedzę dotyczącą: Przemysłu 4.0, zarządzania ryzykiem, decyzji biznesowych.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Stefan Bednarczyk
Zakres przedmiotu:
- Podstawowe pojęcia i koncepcje cyberbezpieczeństwa:
- Poufność, integralność, dostępność, niezaprzeczalność, rozliczalność.
- Zagrożenia, ataki, zasoby.
- Ryzyko, podatności.
- Najniższe uprawnienia i rozdział obowiązków, ochrona wielowarstwowa.
- Rodzaje cyberzagrożeń i ataków:
- Złośliwe oprogramowanie.
- Ataki socjotechniczne.
- Zagrożenia pochodzące z wewnątrz organizacji.
- Przyczyny występowania zagrożeń.
- Fazy cyberataku:
- Kill-chain.
- Model Mitre ATT&CK.
- Przegląd udanych ataków.
- Techniki i zasady zabezpieczania systemów informatycznych zgodnie z defence-in-depth:
- Bezpieczeństwo fizyczne.
- Uwierzytelnianie, autoryzacja, kontrola dostępu.
- Ciągłe monitorowanie sieci, systemy wykrywanie włamań.
- Zapory sieciowe i systemy zapobiegania włamaniom.
- Segmentacja sieci.
- Systemy antywirusowe.
- Hardening systemów.
- Rozwiązania kryptograficzne.
- Normy i dobre praktyki.
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie zasady bezpieczeństwa cybernetycznego sieci przemysłowych.
- Potrafi uruchomić monitorowanie infrastruktury sieciowej w systemie IDS.
- Potrafi wykorzystać wiedzę dotyczącą: Przemysłu 4.0, zarządzania ryzykiem, decyzji biznesowych.
- Jest gotów przestrzegać zasad etyki zawodowej, ma świadomość ważności i zrozumienia pozatechnicznych aspektów i skutków działalności inżynierskiej.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: mgr inż. Stefan Bednarczyk
Zakres przedmiotu:
- Wprowadzenie do napędów i sterowań hydrostatycznych
- Podstawy działania napędów hydraulicznych i hydrotronicznych
- Parametry pracy napędów hydrostatycznych
- Budowa typowego napędu hydraulicznego
- Funkcje elementów składowych napędów i sterowań hydraulicznych
- Wprowadzenie do techniki sterowania proporcjonalnego
- Symulacja działania wybranych układów napędowych w środowisku symulacyjnym
- Budowa układów na stanowiskach szkoleniowych
- Poruszanie robotem w trybie: joint, word, tool
- Analiza działania układów z liniowymi i obrotowymi odbiornikami
- Analiza działania układów sterowanych dławieniowo i objętościowo – porównanie strat mocy
- Analiza działania układów z zaworami proporcjonalnymi przepływu i ciśnienia
- Porównanie wyników analiz symulacyjnych z wynikami pomiarów układów rzeczywistych
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Zna i rozumie zagadnienia z zakresu automatyki, robotyki i mechatroniki, potrzebne do zrozumienia działania współczesnych urządzeń. Zna procesy zachodzące w cyklu życia urządzeń, obiektów i systemów technicznych oraz metody, techniki, narzędzia i materiały stosowane przy rozwiązaniu typowych zadań inżynierskich.
- Zna i rozumie budowę i zasady działania najważniejszych elementów hydrauliki siłowej i hydrotroniki.
- Zna i rozumie symbole graficzne, czyta oraz interpretuje schematy układów hydraulicznych.
- Potrafi samodzielnie budować, montować, uruchamiać i testować poprawność działania prostych układów hydraulicznych i hydrotronicznych.
- Jest gotów krytycznie oceniać posiadaną wiedzę, uznaje znaczenie sięgania po wiedzę i opinię ekspertów w przypadku trudności z samodzielnym rozwiązaniem problemu.
Prowadzący: dr inż. Dominik Rabsztyn
Zakres przedmiotu:
- Przygotowanie przez Uczestnika studiów podyplomowych pracy końcowej.
- Wystąpienia Uczestników z prezentacjami prac końcowych (10 min. wystąpienia każdego Uczestnika i 10 min. wspólnej dyskusji)
- Przygotowanie przez Uczestnika studiów podyplomowych artykułu z obszaru implementacji automatyki przemysłowej.
- Prezentacje przez Uczestników propozycji artykułów oraz dyskusja nad przedstawionymi propozycjami publikacji (10 min. wystąpienia każdego Uczestnika i 10 min. wspólnej dyskusji).
Efekty uczenia się:
Po ukończeniu studiów podyplomowych słuchacz:
- Jest autorem pracy końcowej, zaprezentowanej na zajęciach i obronionej w trakcie wspólnej dyskusji.
- Jest autorem lub współautorem propozycji artykułu z obszaru implementacji automatyki przemysłowej, zaprezentowanego na zajęciach i przeanalizowanego w trakcie wspólnej dyskusji.
Prowadzący: Prof. dr hab. inż. Jerzy Świder

TERMINARZ
Miejsca realizacji zajęć:
- EMT-Systems – siedziba firmy EMT-Systems Sp. z o.o ul. Bojkowska 35A, Gliwice, budynek CECHOWNIA Gliwice
- Wydział MT, sala 279 – Wydział Mechaniczny Technologiczny Politechniki Śląskiej, ul Konarskiego 18A, Gliwice sala 279 II.piętro
- CNT Politechniki Śl. – Naukowo-Dydaktyczne Centrum Nowych Technologii Politechniki Śląskiej, ul Konarskiego 22B, Gliwice
| Termin / Miejsce | Godziny | Przedmiot |
|---|---|---|
| Semestr 1 | ||
| 08 października 2022 r. (sobota) Wydział MT, Sala Posiedzeń | 9:00 – 10:30 | Uroczyste otwarcie studiów ARiCPP |
| 08 października 2022 r. (sobota) EMT-Systems | 11:00 – 17:00 | Automatyzacja sterowania procesami – PLC Mitsubishi /GX Works 2 (mgr inż. Marcin Podsiadły) |
| 09 października 2022 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Automatyzacja sterowania procesami – PLC Siemens / TIAPortal (mgr inż. Marcin Podsiadły) |
| 22 października 2022 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Podstawy automatyki przemysłowej; wykład cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 22 października 2022 r. (sobota) EMT-Systems | 13:00 – 17:00 | Elementy i układy sterowania pneumatycznego; cz.1 (dr hab. inż. Andrzej Wróbel, prof. PŚ) |
| 23 października 2022 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa A 12 osób – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów ABB (mgr inż. Wojciech Szulc) Grupa B 12 osób – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów KUKA (mgr inż. Tomasz Nowak) |
| 05 listopada 2022 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Podstawy automatyki przemysłowej; wykład cz.2 (prof. dr hab. inż. Jerzy Świder) |
| 05 listopada 2022 r. (sobota) EMT-Systems | 13:00 – 17:00 | Elementy i układy sterowania pneumatycznego; cz.2 (dr hab. inż. Andrzej Wróbel, prof. PŚ) |
| 06 listopada 2022 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Przemysłowe sieci komunikacyjne – PROFINET, PROFIBUS, AS-I, Ethernet (dr inż. Piotr Świszcz) |
| 19 listopada 2022 r. (sobota) EMT-Systems | 9:00 – 17:00 | Automatyzacja sterowania procesami – PLC Codesys (dr inż. Piotr Michalski) |
| 20 listopada 2022 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Zastosowania paneli operatorskich HMI (mgr inż. Marcin Podsiadły) |
| 03 grudnia 2022 r. (sobota) EMT-Systems | 9:00 – 17:00 | Wizualizacja procesów przemysłowych – systemy SCADA (mgr inż. Andrzej Kasprzycki) |
| 04 grudnia 2022 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa B 12 osób – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów ABB (mgr inż. Wojciech Szulc) Grupa A 12 osób – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów KUKA (mgr inż. Tomasz Nowak) |
| 17 grudnia 2022 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Egzamin z „Podstaw automatyki przemysłowej” / Omówienie egzaminu. Seminarium z zakresu przygotowywania pracy końcowej; cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 14 stycznia 2023 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Ewentualny egzamin z „Podstaw automatyki przemysłowej” Seminarium z zakresu przygotowywania pracy końcowej; cz.2 (prof. dr hab. inż. Jerzy Świder) |
| Termin / Miejsce | Godziny | Przedmiot |
|---|---|---|
| Semestr 2 | ||
| 18 lutego 2023 r. (sobota) EMT-Systems | 9:00 – 17:00 | Grupa A – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów FANUC (mgr inż. Karol Franc) Grupa B – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów YASKAWA (mgr inż. Tomasz Nowak) |
| 19 lutego 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Metodologia TPM w automatyce przemysłowej (dr hab. inż. Mariusz Hetmańczyk, prof. PŚ) |
| 04 marca 2023 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Teoria sterowania; wykład cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 04 marca 2023 r. (sobota) Wydział MT, sala 279 | 13:00 – 17:00 | Wsparcie i finansowanie procesów cyfryzacji i automatyzacji (CP4.0PŚ – dr Andrzej Soldaty) |
| 05 marca 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa B – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów FANUC (mgr inż. Karol Franc) Grupa A – Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów YASKAWA (mgr inż. Tomasz Nowak) |
| 18 marca 2023 r. (sobota) CNT Politechniki Śl. | 9:00 – 17:00 | Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0 (APA Group) |
| 19 marca 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa A – 12 osób – Napędy i sterowania w hydraulice siłowej (dr inż. Dominik Rabsztyn) Grupa B – 12 osób – Wybrane elektryczne systemy napędowe w przemyśle (mgr inż. Julian Malaka) |
| 01 kwietnia 2023 r. (sobota) Wydział MT, sala 279 | 9:00 – 13:00 | Teoria sterowania; wykład cz.2 (prof. dr hab. inż. Jerzy Świder) |
| 01 kwietnia 2023 r. (sobota) EMT-Systems | 13:00 – 17:00 | Cyberbezpieczeństwo systemów informatycznych (mgr inż. Stefan Bednarczyk) |
| 02 kwietnia 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Grupa B – 12 osób – Napędy i sterowania w hydraulice siłowej (dr inż. Dominik Rabsztyn) Grupa A – 12 osób – Wybrane elektryczne systemy napędowe w przemyśle (mgr inż. Julian Malaka) |
| 15 kwietnia 2023 r. (sobota) EMT-Systems | 9:00 – 13:00 | Egzamin z „Teorii sterowania” / Omówienie egzaminu Seminarium i projekt z zakresu pracy końcowej cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 16 kwietnia 2023 r. (niedziela) EMT-Systems | 9:00 – 17:00 | Cyberbezpieczeństwo systemów automatyki (mgr inż. Stefan Bednarczyk) |
| 13 maja 2023 r. (sobota) EMT-Systems | 9:00 – 13:00 | Ewentualny egzamin z „Teorii sterowania” / Omówienie egzaminu Seminarium i projekt z zakresu pracy końcowej cz.2 (prof. dr hab. inż. Jerzy Świder) |
| 27 maja 2023 r. (sobota) EMT-Systems | 9:00 – 13:00 | Odczyt artykułu z obszaru implementacji automatyki przemysłowej cz.1 (prof. dr hab. inż. Jerzy Świder) |
| 3 czerwca 2023 r. (sobota) EMT-Systems | 9:00 – 13:00 | Odczyt artykułu z obszaru implementacji automatyki przemysłowej cz.2 (prof. dr hab. inż. Jerzy Świder) Zakończenie studiów, rozdanie dyplomów |
LABORATORIA
Prezentujmy opisy, zdjęcia i filmy z laboratoriów, w których będą prowadzone poszczególne zajęcia podczas Studiów Podyplomowych „Automatyzacja, robotyzacja i cyfryzacja procesów produkcyjnych„.
Przedmiot: Automatyzacja sterowania procesami
Laboratoria są wyposażone w nowoczesny sprzęt, funkcjonujący zgodnie ze standardami przemysłowymi, dostarczony przez uznanych, wiodących producentów. W trakcie zajęć z przedmiotu „Automatyzacja sterowania procesami” będą dostępne takie urządzenia, jak:
- sterowniki PLC Siemens SIMATIC S7-1500 z zadajnikami sygnałów,
- oprogramowanie TIAPortal, w wersji V17,
- stanowiska wykonawcze, umożliwiają wykonywanie ćwiczeń w oparciu o rzeczywiste elementy, stosowane w automatyce przemysłowej,
- oprogramowanie Codesys3.5 i GX Works 2,
- sterowniki PLC Mitsubishi i Wago.
Standard realizacji ćwiczeń to jedna lub co najwyżej dwie osoby przy kompletnie wyposażonym stanowisku laboratoryjnym.




Przedmiot: Roboty przemysłowe w aplikacjach produkcyjnych – KUKA, FANUC, ABB, YASKAWA
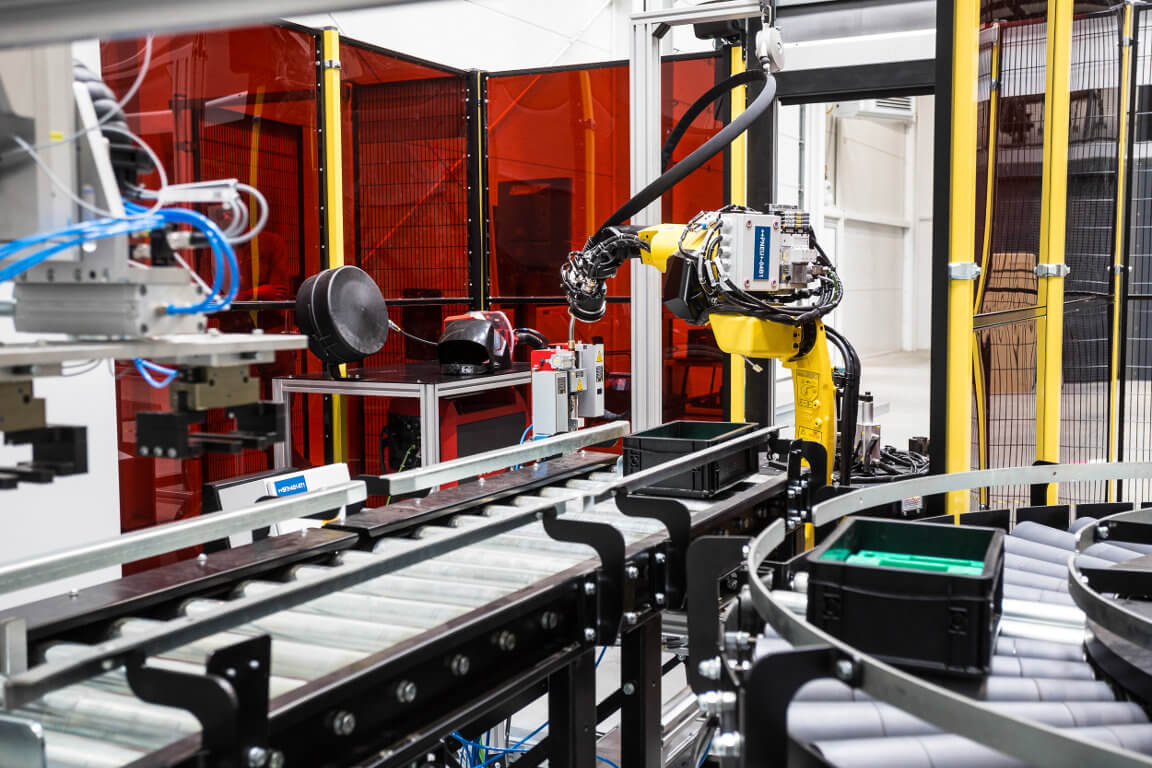
Podczas zajęć z zakresu programowania i obsługi robotów wykorzystujemy autorskie, profesjonalne stanowiska zrobotyzowane, w skład których wchodzi 20 robotów przemysłowych typu:
- FANUC LR Mate 200iD 4s z kontrolerem R-30iB Mate,
- FANUC A-520i – przeznaczony do zastosowań związanych z przenoszeniem i montażem,
- ABB IRB 120 z kontrolerem IRC5 RW 6
- ABB IRB 1200 z kontrolerem IRC5 RW 6
- ABB IRB 2400 z kontrolerem IRC5 RW 5
- ABB IRB 6640 z kontrolerem IRC5 RW 5
- KUKA KR10 R1420 – CYBERTECH NANO,
- KUKA KR6 R900 SIXX z serii KR AGILUS,
- KUKA KR6 R700 SIXX z serii KR AGILUS,
- Yaskawa MOTOMAN seria GP8.




Przedmiot: Przemysłowe sieci komunikacyjne – PROFINET, PROFIBUS, AS-I, Ethernet
Stanowiska sieciowe, wykorzystywane podczas zajęć, są zbudowane z urządzeń wielu producentów. Pozwalają one Uczestnikom zapoznać się w trakcie ćwiczeń z różnymi sposobami konfiguracji i diagnozowania odmiennych typów elementów sieciowych. Stanowiska laboratoryjne składają się z następujących elementów:
- sterowniki Siemens SIMATIC S71500,
- sterowniki Siemens SIMATIC S7-1200 oraz panel HMI KTP700,
- programatory z oprogramowaniem TIAPortal v17,
- Sinamics V90: Przekształtnik + silnik serwo,
- wielofunkcyjne systemy wejść/wyjść ET 200S,
- panele SIMATIC HMI KTP8,
- switche Scalance X204IRT,
- switche SCALANCE XB005,
- systemy pozycjonowania absolutnego Pepperl-Fuchs PXV + taśma kodowa DataMatrix,
- rozproszone układy wejść/wyjść Lumberg 980 ESL 109 oraz 980 ESL 303,
- zdecentralizowane systemy magistrali I / O LioN-Link 940 ESL 601 oraz moduły 8x IN/OUT, 4x AI 0-10V,
- rozproszone wejścia/wyjścia Balluff BNI PNT 502 oraz BNI PNT 302.
Przedmiot: Wizualizacja procesów przemysłowych – systemy SCADA
Laboratoria są wyposażone w nowoczesny sprzęt, funkcjonujący zgodnie ze standardami przemysłowymi, dostarczony przez uznanych, wiodących producentów. Uczestnicy zajęć mają do dyspozycji stanowiska przeznaczone do nauki i rozwiązywania zadań przemysłowych, z zastosowaniem oprogramowania WinCC Professional TIAPortal v17 oraz sterowników Siemens SIMATIC S7-1500.
Przedmiot: Elementy i układy sterowania pneumatycznego
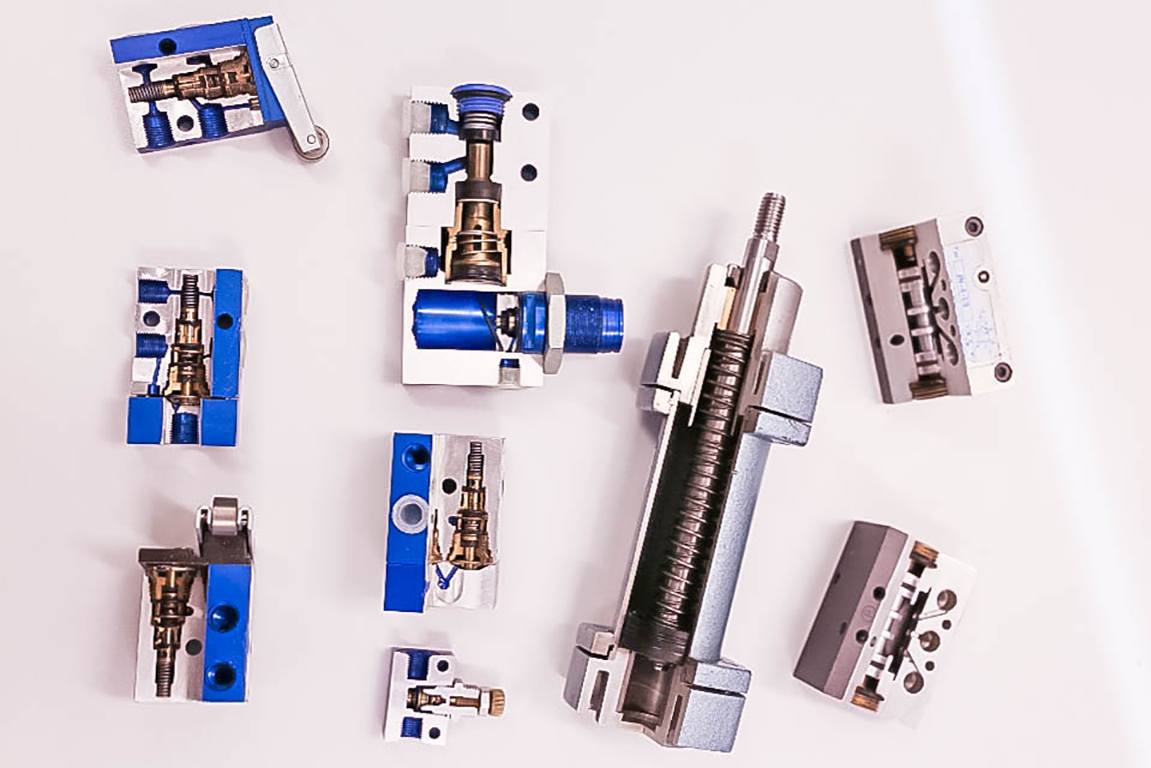
Stanowiska dla Uczestników zostały specjalistycznie wyposażone. Uczestnicy mają dostęp do stacji komputerowych z oprogramowaniem symulacyjnym, najnowszych katalogów produktowych, przekrojów komponentów pneumatyki, bogato wyposażonych laboratoriów, przeznaczonych do wykonywania ćwiczeń praktycznych.


Przedmiot: Napędy i sterowania w hydraulice siłowej
Sale i laboratoria szkoleniowe zapewniają Uczestnikom możliwość pracy na przemysłowych komponentach i układach hydrauliki siłowej najpopularniejszych producentów, takich jak PARKER Hannifin, BOSCH Rexroth, Manuli Fluiconnecto, HYDAC oraz PONAR WADOWICE.
Podczas praktycznych zajęć wykorzystujemy różnorodne stanowiska szkoleniowe.




Przedmiot: Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0
Centrum Testowania Technologii Przemysłu 4.0 to showroom przemysłowy, zaprojektowany, wykonany i prowadzony przez APA GROUP, dostawcy nowoczesnych rozwiązań z zakresu inteligentnej automatyki przemysłowej i systemów zarządzania budynkami, który pozwala zapoznać się z bliska z procesami produkcji w standardach Przemysłu 4.0. Do projektu showroomu zostały zaproszone czołowe organizacje, reprezentujące polską i światową gospodarkę, edukację i przemysł. Duży przekrój prezentowanych na stacji rozwiązań gwarantuje obszerną dawkę wiedzy i unikatową bazę edukacyjną z zakresu Przemysłu 4.0. SZCZEGÓŁOWY OPIS.



KADRA DYDAKTYCZNA
Zajęcia na studiach podyplomowych ARiCPP poprowadzą jedni z najlepszych ekspertów w regionie z poszczególnych dziedzin automatyki przemysłowej, posiadający wieloletnie doświadczenie w zakresie prac wdrożeniowo-inżynierskich, dydaktyki, a także prowadzenia zajęć i szkoleń przemysłowych.
Prof. dr hab. inż. Jerzy Świder
Kierownik studiów podyplomowych Automatyzacja, robotyzacja i cyfryzacja procesów produkcyjnych. Twórca i wieloletni dyrektor Instytutu Automatyzacji Procesów Technologiczny i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechnika Śląska. Dziekan dwóch kadencji Wydziału Mechanicznego Technologicznego. Wychowawca wielu pokoleń inżynierów i magistrów inżynierów mechaników, automatyków oraz opiekun i promotor wielu pracowników naukowych. Autor licznych książek i publikacji naukowych w dziedzinie inżynierii mechanicznej i automatyzacji. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmioty:
- Podstawy automatyki przemysłowej – 10h
- Teoria sterowania – 10h
- Seminarium z zakresu przygotowywania pracy końcowej – 10h
- Seminarium i projekt z zakresu pracy końcowej; artykuł z obszaru implementacji automatyki przemysłowej – 20h

Dr hab. inż. Mariusz Hetmańczyk
Profesor Politechniki Śląskiej, pracuje w Katedrze Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechniki Śląskiej. Ekspert Platformy Przemysłu Przyszłości, który od wielu lat zajmuje się zagadnieniami związanymi z przemysłem 4.0, automatyką i robotyką, sterowaniem, mechatroniką, diagnostyką przemysłową, predykcją stanów bazującej na metodach grafowych oraz technologiami MEMS. Autor ponad 80 publikacji związanych z komputerowym wspomaganiem diagnozy oraz prognozy rozproszonych napędów mechatronicznych. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Metodologia TPM w automatyce przemysłowej – 10h

Dr hab. inż. Andrzej Wróbel
Profesor Politechniki Śląskiej, pracuje w Katedrze Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechniki Śląskiej. Projektant układów sterowania oraz maszyn przemysłowych. Autor i współautor licznych prac naukowych i dydaktycznych z zakresu mechatroniki, automatyki przemysłowej i mechaniki maszyn. Prelegent krajowych i międzynarodowych konferencji naukowych. Kierownik i uczestnik prac badawczych z zakresu szeroko pojętej mechatroniki. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Elementy i układy sterowania pneumatycznego – 10h

Dr Andrzej Soldaty
Dyrektor Centrum Przemysłu 4.0 Politechniki Śląskiej. Swoją karierę zawodową związał z obszarem automatyki przemysłowej. Kierował Działem Robotyzacji w firmie ROBRA „Chemoautomatyka”. Pracował dla Festo, dostawcy rozwiązań i komponentów dla automatyki przemysłowej. Uczestniczył w budowie i rozwoju firmy Festo w Polsce, prowadził również projekty międzynarodowe na obszarze Europy Środkowo-Wschodniej. W latach 2010-2015 był Prezesem Zarządu Festo sp. z o.o. Od czerwca 2016 do marca 2019 był ekspertem w Zespole ds. Transformacji Przemysłowej powołanego przy Ministerstwie Rozwoju. W okresie od marca 2019 do grudnia 2020 był Prezesem Zarządu Fundacji Platforma Przemysłu Przyszłości. Z wykształcenia mechanik i automatyk. Ukończył również studia doktoranckie z ekonomii w Instytucie Nauk Ekonomicznych PAN. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Wsparcie i finansowanie procesów cyfryzacji i automatyzacji – 5h

Dr inż. Piotr Michalski
Doktor nauk technicznych, specjalista z zakresu budowy i eksploatacji maszyn, czujników i sieci przemysłowych oraz napędów elektrycznych, z 24-letnim doświadczeniem przemysłowym. Posiada certyfikowane kwalifikacje z zakresu integrowania systemów automatyki, między innymi takich firm jak: Siemens, ifm electronic, Mitsubishi Electric, Balluff, GE, Festo, SEW Eurodrive oraz B&R. Główny obszar zainteresowań naukowych to współczesne interfejsy komunikacyjne czujników przemysłowych oraz systemy IIoT do predykcyjnego utrzymania pracy maszyn i urządzeń przemysłowych. Jako pracownik naukowo dydaktyczny Politechniki Śląskiej, posiada doświadczenie, które w pracy dydaktycznej przekłada się na wspaniały kontakt z kursantami. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Automatyzacja sterowania procesami – PLC Codesys – 10h

Mgr inż. Marcin Podsiadły
Programista systemów sterowania, specjalizujący się w programowaniu sterowników PLC w środowisku SIEMENS TIA Portal. Wiedzę i praktyczne umiejętności zdobywał w trakcie tworzenia i uruchamiania nowych instalacji, zarówno w kraju, jak i za granicą, gdzie do jego obowiązków należało programowanie sterowników PLC i paneli operatorskich HMI, konfiguracja urządzeń automatyki oraz praca z sieciami przemysłowymi. Doświadczenie zdobywał także w trakcie pracy w dziale Badań i Rozwoju przy projektowaniu systemów nawigacji automatycznych wózków samojezdnych AGV. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Automatyzacja sterowania procesami – PLC Siemens / TIAPortal – 10h
- Automatyzacja sterowania procesami – PLC Mitsubishi /GX Works 2 – 10h
- Zastosowania paneli operatorskich HMI – 10h

Dr inż. Piotr Świszcz
Projektant i realizator wielu technologii z dziedziny węgla i stali, petrochemii i chemii, a także dla przemysłu spożywczego. Kierował ponad dwudziestoma rozruchami technologicznymi, realizowanymi na sterownikach PLC oraz DCS, jak również przez wiele lat pełnił funkcję wiceprezesa firmy zajmującej się automatyką przemysłową. Jego dziedziną zainteresowań są układy nieliniowe, automatyka, sensoryka, sztuczna inteligencja i przemysłowe sieci komunikacyjne. Swoje projekty i ich realizacje wykonuje na urządzeniach firmy SIEMENS, ABB, OMRON, BECKHOFF, GE FANUC, DANFOSS. Stąd szczegółowa znajomość wielu środowisk, w tym: Simatic TIAPortal, AC800M, FREELANCE, CX ONE, Twin Cat, Proficy Machine Edition, APOS. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Przemysłowe sieci komunikacyjne – PROFINET, PROFIBUS, AS-I, Ethernet – 10h

Dr inż. Dominik Rabsztyn
Adiunkt w Katedrze Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechniki. Konstruktor hydrostatycznych układów napędowych i ekspert w zakresie diagnostyki maszyn. Autor oraz współtwórca ponad 30 artykułów naukowo-technicznych z zakresu napędów i sterowań hydraulicznych, budowy i eksploatacji maszyn oraz symulacji komputerowych. Wyróżniony Stypendium Funduszu Stypendialno-Stażowego na Rzecz Rozwoju Transferu Wiedzy w Regionie. Odbył staże naukowe na Uniwersytecie Technicznym w Chemnitz. Prelegent na konferencjach i seminariach związanych z eksploatacją i diagnostyką maszyn. Wieloletni praktyk oraz innowator w zakresie hydrostatycznych układów napędowych. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Napędy i sterowania w hydraulice siłowej – 10h

Mgr inż. Tomasz Nowak
Specjalista z zakresu programowania, uruchomiania oraz ustawiania stacji zrobotyzowanych. Posiada kilkunastoletnie doświadczenie przemysłowe w zakładach zajmujących się bezpośrednio nadzorem nad procesem zgrzewania, klejenia i spawania karoserii samochodowych, a także budowy stacji zrobotyzowanych. Koordynator i trener szkoleń z zakresu programowania robotów FANUC, KUKA, Yaskawa. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów KUKA
- Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów YASKAWA

Mgr inż. Wojciech Szulc
Autor pierwszej platformy szkoleniowej z zakresu robotów przemysłowych w EMT-Systems. Robotyk integrator, działający na projektach linii zrobotyzowanych dla JLR: Discovery, Defender. Daimler: S-Class, C-class, Sprinter, VW: Arteon Shooting break, ID.3, VIBN VW T7. Przeprowadził liczne uruchomienia stanowisk zrobotyzowanych na robotach ABB oraz KUKA, pomiary baz i narzędzi robotów z wykorzystaniem trackera pomiarowego Leica, optymalizacje czasu cyklu, ekspertyzy, oraz certyfikacje CE. Od 6 lat prowadzi również szkolenia z zakresu programowania robotów ABB i od niedawna KUKA w centrum szkoleń inżynierskich EMT-Systems w formie stacjonarnej i on-line. Poprowadzi przedmiot:
- Roboty przemysłowe w aplikacjach produkcyjnych – budowa i programowanie robotów ABB

Mgr inż. Andrzej Kasprzycki
Ekspert automatyk z ponad dwudziestoletnim doświadczeniem, zdobytym przy uruchamianiu rozległych instalacji automatyki przemysłowej, a także w utrzymaniu ruchu dużych linii produkcyjnych, w tym pierwszej instalacji PCS7 w Polsce. Absolwent wydziału Automatyki, Elektroniki i Informatyki Politechniki Śląskiej. W pracy zawodowej programista PLC oraz SCADA, który ma za sobą wiele kompleksowych projektów oraz modernizacji systemów automatyki. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Wizualizacja procesów przemysłowych – systemy SCADA – 10h

Mgr inż. Julian Malaka
Doktorant i pracownik naukowo-dydaktyczny w Katedrze Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania na Wydziale Mechanicznym Technologicznym Politechniki Śląskiej. Jest zaangażowany w prace Fundacji Platformy Przemysłu Przyszłości jako ekspert w dziedzinie robotów autonomicznych. Ma duże doświadczenie w realizacji projektów dotyczących głównie automatyzacji i robotyzacji procesów technologicznych oraz techniki napędowej. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Wybrane, elektryczne systemy napędowe w przemyśle – 10h

Mgr inż. Stefan Bednarczyk
Elektronik, projektant systemów informatycznych, specjalista ds. cyberbezpieczeństwa przemysłowego, kierownik działu technicznego Tekniska Polska. Certyfikowany ekspert z zakresu cyberbezpieczeństwa przemysłowego: GIAC GICSP (Global Industrial Cyber Security Professional). Certyfikaty dot. administracji sieciami: Certified StormShield Network Administrator (CSNA), Cisco CCNA. Szkolenia: CEH v10 (Certified Ethical Hacker), Cisco CCNP. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmioty:
- Cyberbezpieczeństwo systemów automatyki – 10h
- Cyberbezpieczeństwo systemów informatycznych – 5h

Mgr inż. Karol Franc
Posiada wieloletnie doświadczenie zawodowe z zakresu programowania, uruchamiania stacji zrobotyzowanych oraz konfigurowania stref bezpieczeństwa robotów FANUC, ABB, KUKA w największych zakładach branży motoryzacyjnej na terenie Polski i poza jej granicami. Specjalista w uruchamianiu systemów PickMaster oraz iRPickTool. Aktywny zawodowo trener z zakresu programowania robotów FANUC. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmioty:
- Roboty przemysłowe w aplikacjach produkcyjnych budowa i programowanie robotów FANUC

Dr inż. Sebastian Temich
Doktor inżynier w dyscyplinie automatyka, elektronika i elektrotechnika. Specjalista w obszarach sztucznej inteligencji i uczenia maszynowego w zastosowaniu przemysłowym w APA Sp z o.o. W codziennej pracy skupia się na wykorzystaniu metod sztucznej inteligencji w diagnostyce prewencyjnej procesów produkcyjnych. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0 – 10h

mgr inż. Maciej Walczak
Specjalista ds. automatyzacji w APA Sp z o.o. Prowadzi szkolenia i koordynuje dział wsparcia. Specjalizacja: systemy BMS, systemy sterowania SIEMENS SIMATIC S7, wizualizacji SIMATIC HMI oraz sieciach przemysłowych PROFIBUS i PROFINET. Absolwent wydziału AEI Politechniki Śląskiej na kierunku Automatyka i Robotyka. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0 – 10h

mgr inż. Jacek Kucharczyk
Specjalista i pasjonat w dziedzinie systemów IOT i BigData w APA Sp. z o.o. Prowadzi projekty z zakresu przetwarzania dużych zbiorów danych. Absolwent Wydziału AEI Politechniki Śląskiej na kierunku Informatyka. Prowadzi wykłady dla studentów studiów dziennych jak i MBA. Podczas Studiów Podyplomowych ARiCPP poprowadzi przedmiot:
- Rewolucje przemysłowe / Industry 4.0 – cyfryzacja i automatyzacja procesów – Centrum Testowania Technologii Przemysłu 4.0 – 10h

OPŁATY I BONUSY
Ważne informacje dla Uczestnika Studiów Podyplomowych ARiCPP
Informacje podstawowe:
- Koszt uczestnictwa: 14200 zł / osoba.
- Czas trwania Studiów Podyplomowych ARiCPP: 2 semestry.
- Łączna liczba godzin zajęć kontaktowych: 220h
- Łączna liczba dni prowadzenia zajęć kontaktowych: 22
- Każdy uczestnik otrzymuje dodatkowo Voucher o wartości 3000 zł netto na szkolenia w EMT-Systems
- Kandydatem na studia podyplomowe może być osoba, która posiada kwalifikację pełną co najmniej na poziomie szóstym PRK, uzyskaną w systemie szkolnictwa wyższego i nauki (studia pierwszego stopnia, studia drugiego stopnia, jednolite studia magisterskie).
Informacje dodatkowe:
- Dni odbywania się zajęć: soboty i niedziele.
- Jedyne w Polsce studia, umożliwiające praktyczną, indywidualną realizację ćwiczeń z wykorzystaniem kompleksowo wyposażonych stanowisk szkoleniowych, robotów przemysłowych, demonstratorów technologii, aktualnych, licencjonowanych wersji oprogramowania inżynierskiego.
- Zajęcia są prowadzone przez pracowników naukowo-dydaktycznych Politechniki Śląskiej oraz inżynierów praktyków, projektantów i integratorów systemów automatyki.
- Absolwenci Studiów Podyplomowych ARiCPP nabędą kompleksową wiedzę z zakresu najnowocześniejszych trendów w automatyce przemysłowej, zdobędą wiedzę z zakresu wykorzystania i posługiwania się specjalistycznym oprogramowaniem, a także będą przygotowani do prowadzenia nadzoru nad złożonymi systemami produkcyjnymi, działającymi zgodnie ze standardami Przemysłu 4.0.
PARTNERZY
W organizacji i prowadzeniu zajęć wspierają nas następujący Partnerzy i Patroni studiów ARiCPP
Siemens AG jest globalnym liderem technologicznym, który łączy świat cyfrowy z fizycznym, oferując dzięki temu liczne korzyści swoim klientom oraz całemu społeczeństwu. Spółka koncentruje swoje działania na inteligentnej infrastrukturze dla budynków, zdecentralizowanych systemach energetycznych, automatyzacji i cyfryzacji przemysłu przetwórczego i produkcyjnego, a także na inteligentnych rozwiązaniach mobilnych dla branży transportu drogowego i kolejowego.
Lider na rynku inteligentnej automatyki przemysłowej i systemów zarządzania budynkami. Firma posiada 20 lat doświadczenia i dziesiątki udanych wdrożeń dla instytucji, osób prywatnych, gmin i zakładów przemysłowych na całym świecie. APA to kompleksowe podejście do biznesu – od zarządzania i automatyzacji budynków oraz procesów przemysłowych, po efektywne zarządzanie energią. APA Group działa wszędzie tam, gdzie trzeba oswoić technologię i uczynić ją bardziej użyteczną.

Transmisji Danych i Cyberbezpieczeństwa w OT. Niemal 20 lat doświadczenia, prawie 4000 zadowolonych klientów, ponad 70.000 urządzeń dostarczonych na polski rynek, w tym, do najbardziej wymagających i newralgicznych instalacji infrastruktury krytycznej. W sieciach przemysłowych [OT/ICS] i ich cyberbezpieczeństwie pracownicy firmy są ekspertami. Wykonują usługi wdrożenia, doradzają, dostarczają rozwiązania, pomagające realizować konkretne potrzeby w projektach automatyki przemysłowej.
W zakresie działalności Centrum Przemysłu 4.0 Politechniki Śląskiej mieści się prowadzenie działalności badawczej, wdrożeniowej, szkoleniowej i edukacyjnej a także opracowywanie i rozwój innowacyjnych technologii Przemysłu 4.0. To również generowanie know-how oraz własności intelektualnej, pozyskiwanie aparatury umożliwiającej prowadzenie badań i działalności edukacyjnej w celu podnoszenia wiedzy praktycznej polskiej kadry specjalistycznej.
Katowicka Specjalna Strefa Ekonomiczna (KSSE) to w ostatnich latach najlepsza strefa w Polsce, Europie i nr 2 na świecie, według Financial Times. Działa tu blisko 540 firm, które zainwestowały już ponad 44 mld zł i utworzyły 90 tys. miejsc pracy. Inicjatywą KSSE realizowaną na rzecz przedsiębiorstw działających w branży motoryzacyjnej oraz zaawansowanych technologii jest Klaster „Silesia Automotive & Advanced Manufacturing” (SA&AM), którego celem jest zbudowanie silnej platformy wymiany i współpracy między przedsiębiorstwami a instytucjami edukacyjnymi i naukowymi.

DYPLOMY I CERTYFIKATY
Uczestnicy Studiów Podyplomowych ARiCPP, po pozytywnym zaliczeniu planowanych egzaminów i obronie pracy końcowej, otrzymują następujące świadectwa i certyfikaty:
- Świadectwo ukończenia studiów wydane przez Politechnikę Śląską. Wzór zawiera niezbędne elementy świadectwa ukończenia studiów podyplomowych określone odrębnymi przepisami. Studia podyplomowe na Politechnice Śląskiej są prowadzone na podstawie obowiązujących przepisów, a w szczególności ustawy z dnia 20 lipca 2018 r. – Prawo o szkolnictwie wyższym i nauce (j.t. Dz. U. z 2020 r. poz. 85, z późn. zm.), Statutu Politechniki Śląskiej, Regulaminu studiów podyplomowych Politechniki Śląskiej.
- Certyfikat wydany przez EMT-Systems Centrum Szkoleń Inżynierskich.
- Dyplom ukończenia studiów wydany przez Siemens Digital Industries.
- Certyfikat wydany przez Tekniska Polska Przemysłowe Systemy Transmisji Danych Sp. z o. o.
- Certyfikat wydany przez APA Sp. z o.o.



KONTAKT i REKRUTACJA
Oficjalne zapisy zostaną uruchomione w czerwcu w serwisie rekrutacyjnym Politechniki Śląskiej.
Kierownik Studiów Podyplomowych ARiCPP:
- prof. dr hab. inż. Jerzy Świder
- jerzy.swider@polsl.pl
- tel.: 32 237 27 59 oraz 608 552 400
Koordynator Studiów Podyplomowych ARiCPP z ramienia EMT-Systems Centrum Szkoleń Inżynierskich:
- Piotr Podgórski, Dyrektor ds. Planowania, Organizacji i Rozwoju Produktu
- piotr.podgorski@emt-systems.pl
- tel. 505 439 465

